







 Seriály Silniční okruh kolem Prahy Bezpečnostní systémy na Silničním okruhu kolem Prahy
Seriály Silniční okruh kolem Prahy Bezpečnostní systémy na Silničním okruhu kolem PrahyBezpečnostní systémy na Silničním okruhu kolem Prahy
Rubrika: Silniční okruh kolem Prahy
Jednou z nejvýznamnějších silničních staveb dokončených v roce 2010 byla stavba jižní části Silničního okruhu kolem Prahy (SOKP), konkrétně částí 512, 513, 514 a 515. Skupina
ELTODO byla hlavním dodavatelem technologií na této stavbě, mezi kterými byly i technologie pro zvýšení bezpečnosti a plynulosti silničního provozu.

Jižní část SOKP měří 30 km. Při realizaci bylo nutné postavit 70 mostů v celkové délce přes 6,7 km a dva silniční tunely Cholupice a Lochkov v délkách 1 937 m a 1 661 m. V rámci bezpečnosti byla řešena dvě oddělená prostředí – otevřená trasa na zemním tělese s mosty a trasa vedená v tunelech. Pro tento článek byly vybrány dva stěžejní systémy, které na nejvyšší možné úrovni usnadňují práci operátorům dopravy. Jedná se o systém liniového řízení dopravy a o systém videodetekce v tunelech, oba v rámci dodávky skupiny ELTODO.
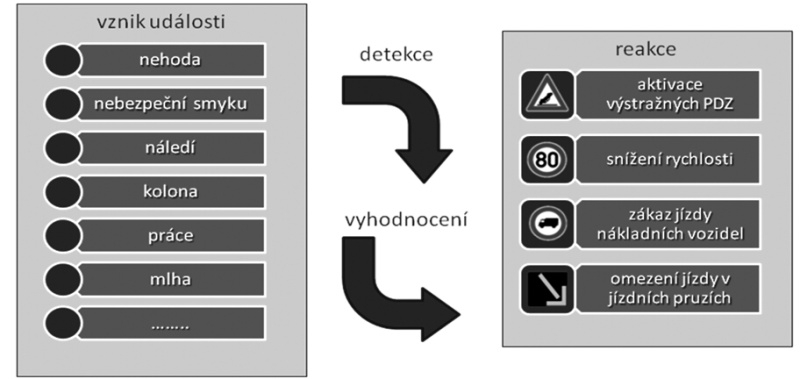
Systém liniového řízení dopravy (LŘD) byl dodán pro otevřenou trasu. Na základě detekce parametrů dopravního proudu ovlivňuje provoz na komunikaci a zlepšuje tak propustnost a bezpečnost dopravní infrastruktury. Systém LŘD je instalován na D1 směr Praha od km 22 po km 10,2 a na SOKP v celé stávající délce obousměrně. Systém je schopen bez zásahu operátora dopravy snižovat rychlost pomocí proměnného dopravního značení (PDZ) umístěného na portálech nad komunikací, a to v závislosti na intenzitě a rychlosti dopravního proudu, tzn. harmonizovat dopravní proud. Dále systém automaticky detekuje vznik kolony vozidel a před nebezpečím varuje dotčené uživatele komunikace. Na základě dat z meteohlásek systém varuje před meteorologickými stavy nepříznivými pro provoz a v závislosti na nebezpečnosti snižuje rychlost dopravního proudu pomocí PDZ. Veškeré principy a algoritmy řízení vznikaly v rámci skupiny ELTODO, na základě výzkumných prací v rámci projektu INEP – projektu VaV MDČR, jehož řešitelem je skupina ELTODO.
Systém liniového řízení dopravy, kvůli kterému je Pražský okruh často nazýván inteligentní dálnicí, je úzce provázán na dopravní stavy obou tunelů nacházejících se na trase SOKP. Mimo „vyhlazování“ povolených rychlostí na otevřené trase a v tunelech jsou vazby i pro dopravní omezení v tunelech, která mají vliv na provoz na volné trase a naopak. Vyhlazováním se myslí proces, při kterém jsou sledovány rychlostní požadavky až pěti sousedních řezů. Výsledná aktivovaná rychlostní omezení odstraňují lokální navýšení povolené rychlosti tak, aby značení bylo pro řidiče co možná neplynulejší s minimem změn. Při vyhlazování mohou být rychlosti pouze sníženy, nikoliv zvýšeny.
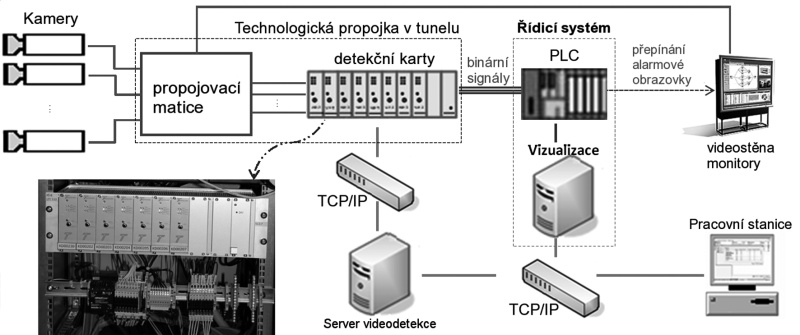
Jakékoliv nestandardní stavy v tunelech, jako jsou kolony, zastavená vozidla nebo jiné překážky na vozovce, můžou mít fatální následky. Proto jsou tunely vybaveny systémem videodetekce pro vyhodnocování nestandardních událostí, navrženém dle normy TP98 (Technologické vybavení tunelů), č. j. 449/03-120-RS/1. Tunely Cholupice a Lochkov na Pražském okruhu díky předpokládaným intenzitám dopravy spadají do kategorie, kde je dohledový systém vyžadován. Dodaný uzavřený dohledový televizní systém (CCTV) je tvořen soustavou kamer, propojovacích matic a ústřednou. Ústředna tato zařízení integruje a je napojena na řídicí systém. Kamery v robustních konstrukcích jsou obvykle uchyceny na vnitřní klenbě tunelu a pomocí pevné konzole jsou umístěny ve výšce cca 5–6 m nad vozovkou. Kamery jsou v tunelech rozmístěny tak, že vzdálenost mezi nimi nepřesahuje 7 m a nevznikají nesledovaná místa. Pohledy kamer jsou směrovány po směru jízdy vozidel s úhlem vůči vozovce přibližně 45°. Poslední kamera na výjezdu z tunelu je z důvodu snížení citlivosti na venkovní prostředí otočena směrem do tunelu. Kamery jsou optickou trasou připojeny do technologických propojek, kde jsou signály dále distribuovány pro videodohled a videodetekci.
Pro tunely na SOKP byla zvolena varianta distribuovaného systému na bázi detekčních karet (Traficon VIP-T) pro analýzu analogového signálu. Toto řešení bylo zvoleno z důvodu možnosti sjednocení kamerového a detekčního systému v tunelových propojkách a minimalizace nákladů na kabeláž podél tunelů. Schéma systému videodetekce s ilustrací detekčních karet je zobrazeno na obr. 2.
PRINCIP FUNGOVÁNÍ VIDEODETEKCE
Systémy videodetekce na principu analýzy videoobrazu vyhodnocují nestandardní jevy v zorném úhlu pohledu kamer. Principiálně je fungování softwaru u všech výrobců videodetekčních systémů stejné (Citilog, Autoscope, Traficon, Iteris, …), detailní fungování jednotlivých procesů je většinou chráněné know-how jednotlivých společností. U tunelů SOKP se z hardwarového hlediska jedná o analyzační karty postavené na bázi výkonných signálových mikroprocesorů. Na těchto kartách běží několik paralelních procesů pro vyhodnocování událostí. Pro tyto události se nastavuje separátně několik vrstev virtuálních smyček. Smyčky představují oblast pohledu kamery, ve kterém jsou hustě rozprostřeny detekční body – mikrosenzory. Jejich rozložení je dáno kalibrací kamery, kde se definuje její výška, fokální vzdálenost objektivu a kalibrační přímky. Na tomto základě si systém dopočítá délku a šířku analyzovaného úseku již dokáže na základě změn na detekčních bodech měřit rozměry objektů (délky aut, výšku chodce). Pro větší vzdálenost se hustota bodů zvyšuje. Detekční body uvnitř detekčních smyček sledují barevný odstín obrazu v monochromatických barvách. Vyhodnocení na základě těchto změn na detekčních bodech závisí na konkrétním typu události.
Detekce události zastavené vozidlo se skládá ze dvou ověřovacích algoritmů. Za prvé je sledován průběh barevných změn na detekčních bodech podél smyčky způsobený pohybujícími se vozidly, přesněji úhel vektoru pohybujících se vozidel, který se v případě projíždějících vozidel neustále mění. Pokud vozidlo zastaví, tak několik detekčních bodů, které jsou překryty zastaveným vozidlem, má jiný odstín než zbytek sledované oblasti. Tato změna je zaznamenána a po uběhnutí ověřovací doby několika sekund je spuštěn další ověřovací algoritmus, kterým jsou následně na detekčních bodech porovnávány odstíny v rozsahu šedých barev v pozadí obrazu a jim odpovídající změny v popředí sledovaného obrazu. Pokud i druhý ověřovací algoritmus potvrdí pozitivní detekci, je vyhlášena událost zastavené vozidlo. Čas, za který proběhne vyhlášení události, se nazývá reakční. Na podobném principu pracuje algoritmus pro detekci spadlého objektu. V tomto případě je síť detekčních bodů hustší, ale změna je detekována na menším množství těchto bodů.
Algoritmus pro událost typu chodec je založen na principu sledování pohybujícího se objektu v oblastech vozovky, chodníků a částečně i stěn pokrytými virtuálními smyčkami. V principu je sledováno těleso s výškou cca dva metry, šířkou kolem půl metru pohybující se rychlostí 3–5 km/h. Doba vyhodnocení je nízká, obvykle do tří sekund.
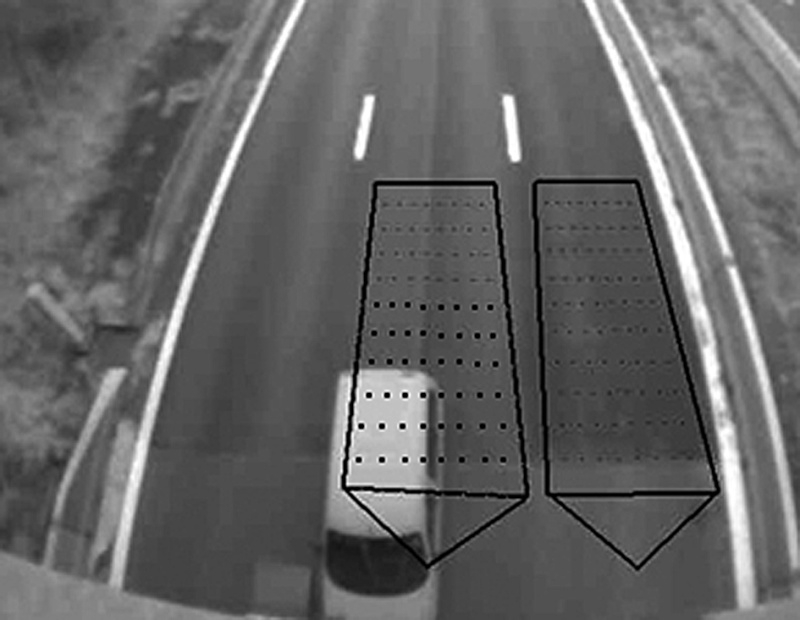
U detekce dopravních událostí typu jízda v protisměru, pomalu/rychle jedoucí vozidla a sběr dopravních dat, se definují směrové smyčky v oblastech jízdních pruhů (opět pro jednotlivé typy událostí zvlášť). Ze zkušeností se umísťují spíše do spodní části obrazovky (tedy do oblasti blíže ke kameře). Šířka smyček se pohybuje kolem 3 m, délka je závislá od typu události, obvykle 12 až 20 m. Ve smyčce jsou rozloženy detekční body, které jsou vázané do detekčních čar (trip wires). Vozidlo projíždějící virtuální smyčkou postupně překrývá jednotlivé detekční čáry v definovaném pořadí. Pokud dojde k překrývání detekčních čar v opačném směru, než je definována smyčka, je vyvolána událost jízda v protisměru. V závislosti od rychlosti postupného překrývání detekčních čar jsou vyvolávány události pomalu, nebo rychle jedoucí vozidlo. V rámci sběru dopravních dat jsou na základě překrytí a rychlosti projíždění virtuální smyčky měřeny parametry dopravního proudu, tedy intenzita, obsazenost, rychlost, klasifikace vozidel na základě délky, časové a vzdálenostní odstupy. Na základě délky pokrytí smyčky je možné vozidlo klasifikovat až do pěti předdefinovaných tříd. Data jsou agregována do nastavitelných intervalů. Detekce kouře funguje na principu detekce celkového postupného zhoršení kvality obrazu. Celé zorné pole kamery je rozdělené do matice buněk a jednotlivé buňky jsou zvlášť vyhodnocovány algoritmy pro měření kvality a kontrastu obrazu. Nejdříve vznikají tzv. pre-alarmy v jednotlivých buňkách a definovaný počet pre-alarmů vyvolá událost kouře. Na podobném principu pracuje také algoritmus pro kontrolu kvality obrazu, který ale sleduje dlouhodobé zhoršení kvality obrazu, případně rušení, jako jsou výpadky signálů, černé pruhy atd. V případě nízkých hodnot informuje technickou
událostí o špatné kvalitě videoobrazu a potlačuje videodetekční systém, aby se minimalizoval počet falešných alarmů.
FUNGOVÁNÍ A ZKUŠENOSTI Z INSTALACÍ NA SOKP
Konfigurace videodetekčního systému na SOKP probíhala standardně před otevřením a byla odzkoušena v rámci individuálních i komplexních zkoušek. Systém liniového řízení dopravy byl před otevřením testován po stránce funkčnosti jednotlivých komponent a funkčnosti reakcí na zadané události. Teprve ale za ostrého provozu bylo možné oba systémy řádně odladit. U liniového řízení dopravy až během provozu mohly být testovány detekční algoritmy a správnost nastavení citlivosti systému. Díky tomu byly po spuštění upravovány některé algoritmy, jako například kritérium detekce kolony na bázi dopravního rušení, které sleduje intenzitu a rychlost dopravního proudu na dvou sousedních řezech, vypočítává lokální hustotu vozidel v úseku a sleduje její změny v čase. S prvotním nastavením běžné vlny, v kterých se vozidla pohybují, byly detekovány jako kolona. Nyní již ale algoritmus reaguje správně a nedochází k falešným poplachům. U videodetekce byly zjištěny falešné alarmy události chodec, způsobené odlesky od předních světel projíždějících aut (zejména kamionů) na stěnách zálivků. Výrazněji se projevovaly v tunelu Lochkov, kde je barevný kontrast mezi modro-zelenými stěnami a bílými chodeckými zálivy výrazný. Pro řešení této skutečnosti musely být všechny bílé plochy v zálivech pro chodce u obou tunelů vymaskovány. Dalším předmětem ladění byly falešné alarmy u událostí zastavené vozidlo a spadlý objekt v oblasti bílých pruhů, způsobené jemně vyfrézovanými oblastmi kolem těchto pruhů, ve kterých se za deště leskla stojící dešťová voda. Výsledkem byla modifikace smyček (obr. 3 vlevo). V neposlední řadě byly řešeny falešné alarmy jízdy v protisměru v době spuštěných ventilátorů. Tento jev byl způsoben jemným vertikálním rozkmitáním kamer a vozidla pohybující se ve směru jízdy byla vyhodnocena jako jedoucí v protisměru. Zde pomohlo zvýšení úrovně citlivosti a dodatečné upevnění několika problematických kamer.
Spolehlivost videodetekce na SOKP dosahuje průměrně 95 %, a je závislá na reakčních a ověřovacích dobách, osvětlení, upevnění a čistotě kamer. Počet falešných alarmů na kameru a den uváděnou výrobcem na hodnotě maximálně 0,07 falešného alarmu na kameru/den se povedlo dosáhnout po dodatečném ladění, přičemž v současnosti se falešné alarmy vyskytují jen za deštivého počasí a sněžení. Za sněhu je počet alarmů o něco vyšší, způsoben zavátým sněhem v tunelu a odlesky na vozovce od soli a opadaného sněhu z aut. Ani zde míra falešných alarmů ale v situaci bez skutečných událostí nepřesahuje průměrně 0,12 falešného alarmu na kameru/den.
Oba uvedené systémy, jak liniové řízení dopravy, tak systém videodetekce v tunelu, jsou napřímo napojeny na nově vybudovaný dispečink SSÚD Rudná, kde je nepřetržitý dohled nad provozem celého dokončeného Pražského okruhu. Systémy jsou monitorovány a v rámci zkušebního provozu je zajištěno jejich nastavení tak, aby doprava na celém SOKP byla co nejplynulejší a nejbezpečnější.
V rámci trendu neustále narůstajícího objemu dopravy, nových dopravních staveb včetně tunelů, a v neposlední řadě zvyšujících se nároků na bezpečnost dopravy, můžeme předpokládat, že telematické systémy pro zvyšování propustnosti a bezpečnosti komunikací budou i nadále vyvíjeny a zdokonalovány. Oba popsané systémy odpovídají současným nárokům na řešení uvedené problematiky silniční dopravy a nejen u videodetekce, ale i u liniového řízení dopravy se dá předpokládat implementace na dalších liniových dopravních stavbách realizovaných v České republice i v zahraničí.
Safety System of the Ring Road Around Prague
One of the most significant road section completed in 2010 was the construction of southern part of the Ring Road around Prague (RRAP). Southern part of RRAP is 30 km long. During its execution it was necessary to build 70 bridges with total length of over 6.7 km and two road tunnels Cholupice and Lochkov with lengths of 1,937 m and 1,661 m. Due to safety there were two main separate environment being solved–open route on embankment with bridges and route inside tunnels. For this article two principal systems simplifying work of the traffic operators on the highest possible level were chosen. It is the system of Road Line Traffic Control and system of video detection in tunnels.
RECENZE/REVIEW
Ing. Pavel Hrubeš, Ph.D.,
hrubes@fd.cvut.cz,
Fakulta dopravní
ČVUT v Praze




NEJčtenější souvisejicí články (v posledních 30-ti dnech)
Problematikou vnějšího Pražského okruhu (SOKP) se časopis SILNICE ŽELEZNICE zabýval již dříve, a to v čísle 1/2010, kde ...
Úsek 512 je součástí jihozápadního segmentu okruhu kolem Prahy. Trasa začíná mimoúrovňovým křížením s dálnicí D1 poblíž ...
řekl v rozhovoru nejen o Silničním okruhu kolem Prahy Ing. Marcel Rückl, poradce primátora hl. m. Prahy MUDr. Pavla Béma...
NEJlépe hodnocené související články
Pražský dálniční okruh byl od samého počátku jeho projektování v posledních měsících roku 1938 vždy trasován a projektov...
Úsek 512 D1 – Jesenice – Vestec, klíčová část jihozápadního segmentu Silničního okruhu kolem Prahy (SOKP), j...
NEJdiskutovanější související články
Otevření Pražského okruhu v jižní části města zkrátí řidičům, kteří se potřebují dostat na letiště Praha/Ruzyně, dobu jí...
sdělil v rozhovoru pro časopis SILNICE ŽELEZNICE Ing. Michal Reiter, předseda představenstva a generální ředitel Skanska...



ISSN 1803-8441 | © Copyright 2002 - 2026 KONSTRUKCE Media, s.r.o.
Jakékoliv užití obsahu včetně převzetí, šíření či dalšího zpřístupňování článků a fotografií je bez souhlasu nakladatelství zakázáno.
KONSTRUKCE Media, s.r.o., se sídlem Starobělská 1133/5, 700 30 Ostrava, zapsaná v obchodním rejstříku vedeným u Krajského soudu v Ostravě, oddíl C, vložka 22003, Identifikační sídlo: 25851276 | Tel.: 597 317 578 | Fax: 597 579 166


