








Kontinuální prostorové skenování komunikace
Rubrika: Bezpečnost
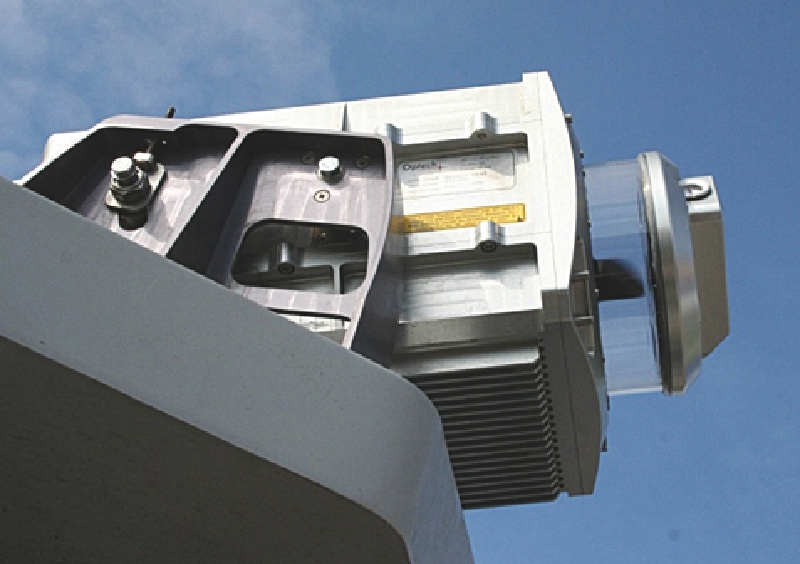
Jedná se o velmi efektivní metodu, jež umožňuje skenovat okolní terén z jedoucího automobilu a to s vysokou přesností a rychlostí. Celé zařízení se skládá z pozičního a orientačního systému, dvou digitálních kamer a dvou laserových skenerů.

Poziční a orientační systém slouží k určení přesné trajektorie měřícího vozidla v reálném čase. Skládá se ze dvou GPS přijímačů, snímače otáček a inerciální měřící jednotky obsahující tři gyroskopy a tři akcelerometry. Během jediné sekundy se ukládá 200 záznamů, ze kterých je určena pozice vozidla a jeho náklony a stočení v reálném čase. Přesnost vlastního laserového měření je v řádu milimetrů, ale výsledné měření je nejvíce ovlivněno kvalitou GPS signálu, při kvalitním příjmu je střední chyba určení polohy souřadnic XY 2 cm a střední chyba určení výšky Z je 5 cm. Při ztrátě signálu GPS, kdy je pozice vozidla počítána pouze ze snímače otáček kola a z inerciální měřící jednotky, se přesnost určení polohy pochopitelně zhoršuje.
Použité laserové skenery vycházejí z mnohaletých zkušeností výrobce s leteckými lidary. Od toho se odvíjí především rychlost skenování a schopnost zaznamenat až čtyři odrazy z jednoho pulsu. Zrcátko v každém skeneru se otáčí rychlostí 9 000 otáček za minutu a odráží laserový svazek v rozsahu celých 360 °. Každou sekundu je vysláno do okolí 500 000 pulsů. Bezpečnost použitého laseru je třídy I., což znamená, že laserové záření je naprosto bezpečné a to i při průchodu přes optickou soustavu. Svazek paprsků je neviditelný lidskému oku. Dosah skeneru je 200 m při alespoň 20% odrazivosti povrchu – je tedy možné zaměřit pás o šířce 400 m. Hustotu skenovaných bodů lze jednoduše ovlivňovat změnou rychlosti vozidla. Laserové hlavice jsou doplněny digitálními kamerami, které snímají měřený prostor a umožňují obarvit mračno bodů pro lepší orientaci v modelu.
Laserové skenování přináší přesné prostorové informace o objektech na povrchu komunikace. V kombinaci se zaměřením georadarem, lze získat i informace o strukturách pod povrchem komunikace.
Primárním výstupem ze systému je mračno bodů v souřadnicovém systému WGS-84, kde každý bod si nese informaci o intenzitě odrazivosti povrchu, úhel odrazu laserového svazku vůči normále povrchu, počet a číslo odrazu. Lze tedy zjišťovat vzájemnou geometrickou polohu libovolných bodů a při kvalitním GPS signálu lze s přesností na 5 cm zpětně nalézt polohu každého bodu. Mračno bodů je možné z pořízených snímků obarvit reálnými barvami a tím zvýšit přehlednost prostorového modelu.
Velkou výhodou tohoto systému je jeho rychlost sběru dat. Dle požadavků na hustotu mračna bodů je možné skenovat při rychlosti od 20 do 120 km/h. V praxi to znamená, že například v zástavbě, kde požadujeme co nejhustší pokrytí body, je možné zmapovat 40 až 80 km za jeden den, zatímco na dálnicích není problém zmapovat až 120 km během jednoho dne. Za běžný skenovací den lze získat cca 3 miliardy bodů. Získaná data je možné v podstatě ihned použít pro jednoduché aplikace. Vysoká bezpečnost emitovaného laserového záření umožňuje provádět měření za plného provozu bez jakýchkoli uzavírek. V některých případech, kdy nepotřebujeme snímky z kamer, je možné provádět měření v noci, kdy je provoz minimální.
Technologie je využívána pro podrobné zaměření polohopisu a výškopisu tj. pro snadné generování digitálních modelů terénů, rychlé a přesné získání podkladů pro projektové práce a pro možnost kombinace s dalšími mapovými podklady, např. s katastrální mapou. Dále pro okamžitou kontrolu a sledování (monitoring) postupu stavebních prací, zaměření stávajícího stavu staveb, stanovení průjezdných profilů, sledování změn v okolí komunikace (půdní eroze, skalní sesuvy, růst vegetace,…) a lokalizace objektů (překážek) v blízkosti komunikací, které z pohledu bezpečnosti silničního provozu (např. reklamní poutače, svodidla) mohou býti problematické. V neposlední řadě lze technologii využít pro pasportizaci dopravního značení, ověření rozhledových poměrů a mnoho dalších aplikací.
PRAKTICKÉ ZKUŠENOSTI S TECHNOLOGIÍ
Ústav soudního znalectví v dopravě Fakulty dopravní ČVUT v Praze využil tuto technologii pro vytvoření virtuálního modelu a mapových podkladů komunikace R46 (Výškov – Olomouc), které následně použil při analýze dopravních nehod na této komunikaci. Mapové podklady doplnily chybějící části původní projektové dokumentace, ověřily trasování stávajícího stavu s původním projektem. Matematický model ukázal současné defekty v povrchu komunikace.
Měřící automobil se při skenování pohyboval rychlostí 70 km/h a kontinuálně snímal vozovku včetně okolního terénu. Pro zjednodušení zpracování naměřených dat byl ve spolupráci s Policií ČR zpomalen dopravní proud tak, aby vozidla neprojížděla okolo měřícího automobilu a tím nezpůsobovala chyby v povrchu prostorového modelu. Měření bylo provedeno v každém směru pouze jedním průjezdem a obě měření byla spojena přes referenční body do výsledného prostorového modelu. Naskenování úseku 2 × 40 km trvalo přibližně čtyři hodiny a to včetně zaměření referenčních bodů.
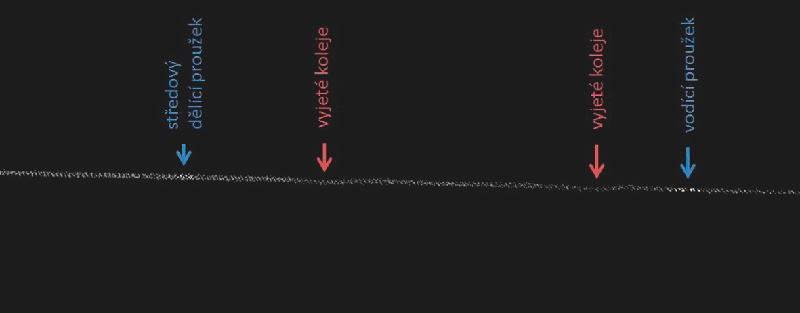
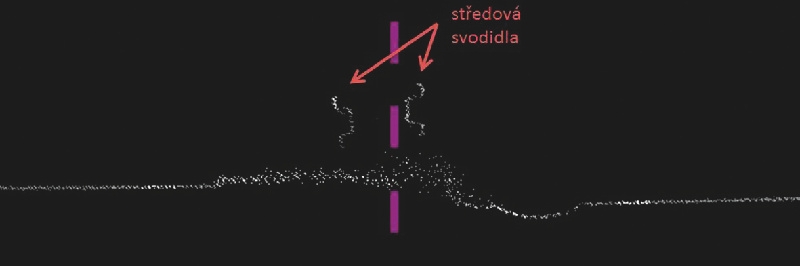
Následné zpracování mračna bodů bylo časově i hardwarově náročné vzhledem k délce měřeného úseku. Jedním z výstupů byla pasportizace měřeného úseku, kde za počáteční bod ve výsledném modelu byl zvolen začátek staničení komunikace (kilometrovník 0,0 km – dopravní značka IS18a). V prostorovém modelu byly vygenerovány pravidelné úseky (řezy) po 50 m, kde byly požadované body převedeny do tabulkového formátu. Výsledný tabulkový zápis obsahuje informace o geometrickém uspořádání komunikace v místě řezu (staničení, polohu GPS, počet vyznačených pruhů, šířky a sklony vyznačených pruhů, poloměry výškových a směrových oblouků, polohu a výšku svodnice svodidel a výšku nivelety komunikace).
Z analýzy prostorového modelu jsou patrné spádové poměry (nebezpečí aquaplaningu, lokálních kaluží), defekty v povrchu vozovky a zlomy v niveletě trasy (zhoršení jízdní stability vozidel), případně nevyhovující výška svodnice nebo poškození svodidel (zhoršení pasivní bezpečnosti komunikace (viz obr. 3 až 7).
ZÁVĚREM
Technologie kontinuálního prostorového skenování může být užitečným nástrojem k prověření prostorových poměrů komunikace, ověření správného postavení bezpečnostních prvků a určení míst s defekty na komunikaci. Ačkoliv je zpracování velkého objemu naměřených dat časově a hardwarově náročné, lze posléze snadno určit problematická místa na komunikaci od pracovního stolu a dle závažnosti navrhnout způsob jejich oprav.
LITERATURA:
[1] Výzkumná zpráva, Zkrácená analýza dopravních nehod na silnici R46 v úseku km 0 až 39, Ústav soudního znalectví v dopravě, Fakulta dopravní ČVUT v Praze, 2011
[2] Firemní dokumentace k systémům LYNX Mobile Mapper, GPS Trimble R8 (www.geovap.cz)
Road Continual 3D Scanning
The technology of continual 3D scanning is very efficient method that enables us to scan terrain from moving vehicle fast and with high accuracy. The device consists of position and orientation systems, two digital cameras and two laser scanners. The accuracy of laser scanning is within tenths of millimetres, but the whole measurement is most influenced by the quality of GPS signal. This method can supplement the human subjective review of the road and help choosing proper road repair technology.



NEJčtenější souvisejicí články (v posledních 30-ti dnech)
Ocelová silniční svodidla, jak je známo, zvyšují bezpečnost v silniční dopravě. Jsou proto navržena a odzkoušena tak, ab...
Železniční zabezpečovací technika je jednou z částí železničního systému, která se velkou mírou podílí na zajištění bezp...
Když se řekne bezpečnost na železnici, automaticky se každému, kdo se v tomto oboru pohybuje, vybaví AŽD Praha. Tato čes...
NEJlépe hodnocené související články
Železniční zabezpečovací technika je jednou z částí železničního systému, která se velkou mírou podílí na zajištění bezp...
NEJdiskutovanější související články
V dubnu 2009 zahajuje Ministerstvo dopravy ČR ve spolupráci s Českým sdružením obětí dopravních nehod a Organi...



ISSN 1803-8441 | © Copyright 2002 - 2026 KONSTRUKCE Media, s.r.o.
Jakékoliv užití obsahu včetně převzetí, šíření či dalšího zpřístupňování článků a fotografií je bez souhlasu nakladatelství zakázáno.
KONSTRUKCE Media, s.r.o., se sídlem Starobělská 1133/5, 700 30 Ostrava, zapsaná v obchodním rejstříku vedeným u Krajského soudu v Ostravě, oddíl C, vložka 22003, Identifikační sídlo: 25851276 | Tel.: 597 317 578 | Fax: 597 579 166


