








Aplikace počítačového vidění v dopravním inženýrství
Rubrika: Zajímavosti
Článek v úvodu stručně shrnuje teorii počítačového vidění, základní principy detekce objektu v obraze a postup vyhodnocení jednotlivých pixelů. V další části je popsán postup získání vhodného videozáznamu a praktická aplikace teoretických principů představených v úvodu. Výsledkem aplikace těchto principů je získaní trajektorií vozidel v čase a O/D matic.
ÚVOD
S analýzou obrazu se v dnešní době můžeme setkat v mnoha oborech. Nástroje lze použít v aplikacích pro letectví, biotechnologie, lékařství, materiálové inženýrství, při předpovědi počasí, ve vojenství nebo pro dopravu. Dříve bylo limitující především velké množství dat a jejich náročné zpracování. Tato omezení však při dnešní vyspělosti technologií prakticky vymizela. Hlavním motivační prvkem pro zavádění těchto analýz je především zautomatizování a zefektivnění práce, které následně přináší velké množství potřebných dat.
PRINCIP ANALÝZY OBRAZU
Prvním krokem při zpracování obrazu je snímání. Tento krok je z hlediska analýzy obrazu klíčový. Podstatná je především volba druhu a polohy snímacího zařízení a osvětlení dané scény. Nedostatečná kvalita záznamu může být příčinou nezdaru celého procesu analýzy obrazu. Při snímání dochází k digitalizaci obrazu, což je přechod od spojité fyzikální funkce k diskrétní funkci elektrického signálu. Digitalizace se skládá ze dvou nezávislých částí.
První je vzorkování bodů, přičemž podstatný je vzorkovací interval, který určuje kvalitu detailů daného záznamu. Hlavní pravidlo vzorování shrnuje Shannonova věta, která tvrdí, že vzorkovací frekvence musí být alespoň dvakrát větší než nejvyšší frekvence vzorkovaného signálu. Konečným výsledkem procesu vzorkování je zisk obrazových ploch, tzv. pixelů. Druhou částí je kvantování, jehož podstata spočívá v převodu hodnoty jasu obrazové funkce do diskrétního tvaru a přiřazení nejbližší kvantovací úrovně. Při malém počtu úrovní dojde k nekvalitnímu rozložení jasu a tedy zhoršení kvality obrazu. Kvantovacích úrovní by mělo být více, než je schopno rozlišit lidské oko, což je přibližně padesát úrovní jasu.
Druhým krokem je předzpracování. Obraz je během snímání poškozen, například určitým šumem nebo zkreslením. Tento krok má za cíl tyto vlivy odstranit, což znamená potlačit některé informace a zdůraznit v obrazu rysy, které jsou podstatné pro další zpracování. Vstupem i výstupem je diskrétní obraz a hlavními nástroji pro předzpracování je jasová transformace, geometrická transformace, filtrace a ostření a matematická morfologie. Podrobněji zde uvedeme pouze jasovou a geometrickou transformaci.
Během jasové transformace je každému pixelu o určité hodnotě jasu přiřazena nová hodnota jasu podle transformační funkce. Všeobecně známým je příklad negativu. Graf znázorňující četnost určitých úrovní v obraze se nazývá histogram. V případě analýzy obrazu histogram popisuje snímek, ale nevypovídá o rozlišitelnosti snímku. Dva různé snímky mohou mít tedy stejný histogram, který je vyjádřen vzorcem: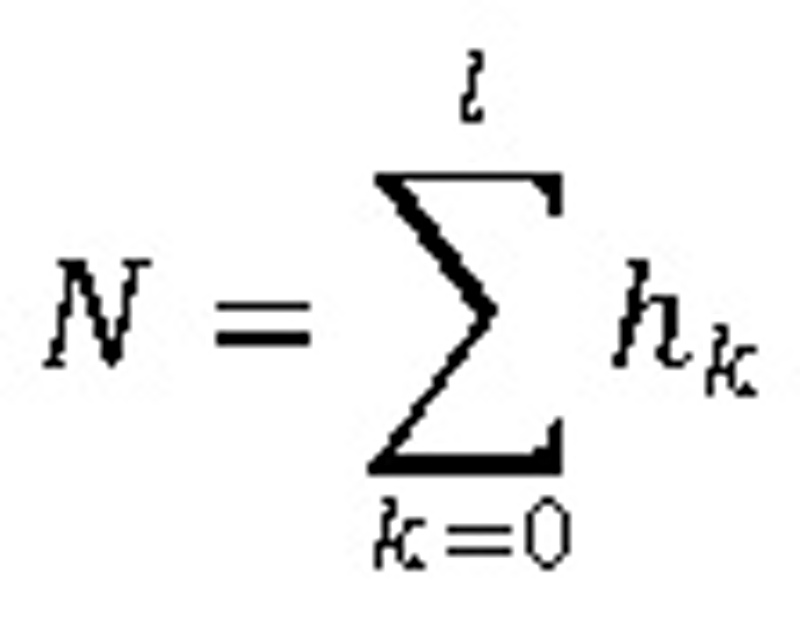
kde hk je počet pixelů s úrovní jasu k a k až l je rozsah jasu. Transformace jasu spočívá v rovnoměrnější rozložení jasových úrovní v obraze, kterým můžeme docílit zvýšení kontrastu detailů. Tento proces se nazývá ekvalizace histogramu.
Geometrická transformace je využita při deformaci objektů způsobených nevhodnou polohou nebo nekvalitním snímacím zařízením. Mezi základní geometrické transformace patří posunutí, změna měřítka a otočení.
Posunutí bodu A[x,y] o vektor t je definováno maticovým zápisem: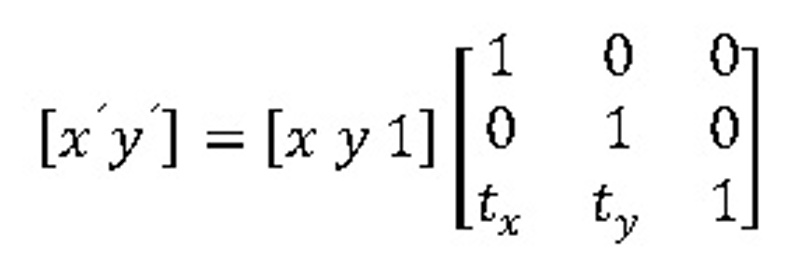
kde x, y jsou souřadnice původního bodu a x’, y’ jsou souřadnice nového bodů posunutého o vektor t.
Změna měřítka sx ve směru x a sy ve směru y je definováno maticovým zápisem: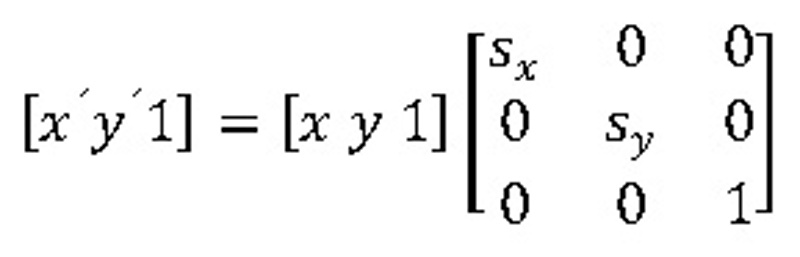
Otočení kolem počátku o úhel { je definováno maticovým zápisem: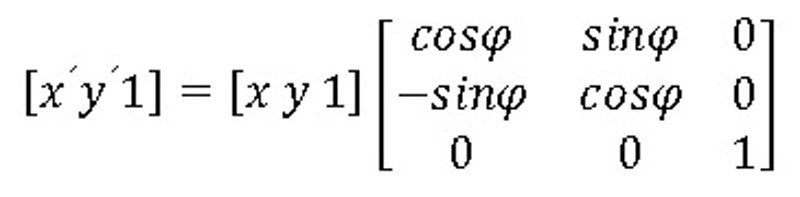
Třetím krokem analýzy obrazu je segmentace. Tato fáze spočívá ve vyhledání objektů, které jsou pro nás důležité a zvýrazní je oproti pozadí. Pro tento krok existuje několik metod. Metoda hledání objektů pomocí rozdílů spočívá v zaznamenání rozdílů mezi aktuálním snímkem a prostředím, z kterého jsou dané objekty odfiltrovány. Velkou roli zde hrají stíny, jejichž eliminace je obtížná. Rozdíl je pak převeden do binárního obrazu, u nějž je podstatné zvolit správnou úroveň prahu (T), jež určuje, zda je daný bod zařazen k pozadí nebo k hledanému objektu na základě odlišné úrovně jasu.
![]()
Pro hledání objektů pomocí detekce hran existují různé metody založeny na využití první a druhé derivace obrazového signálu. Hrana je v těchto případech definována jako výrazná změna jasu. V současnosti je asi nejpřesnějším metodou Cannyho hranový detektor, který pro sestavení konvoluční masky užívá 2D Gaussovu funkci, která eliminuje šum.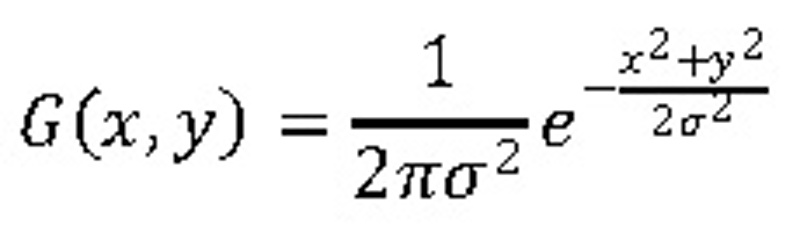
kde x, y jsou souřadnice pixelu v obraze a v je standartní odchylka rozdělení.
S využitím Sobelova operátoru je nalezena velikost a směr gradientu. Hranový operátor funguje na principu konvoluce obrazu.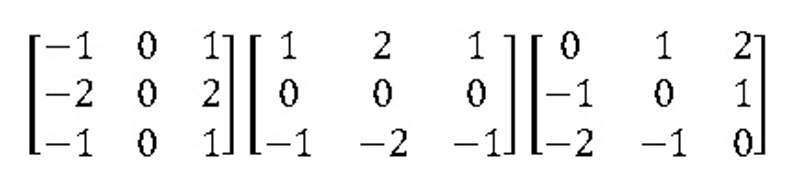
Sobelův operátor
Po těchto krocích jsou detekovány tlusté hrany, pro jejichž ztenčení je nutné vyhledat lokální maxima gradientů, protože se předpokládá, že hrana dává největší hodnotu v místě, kde se skutečně nachází. Poslední fází je prahování s hysterezí, které odstraní falešné hrany.
Popis hledaných objektů je čtvrtým krokem při analýze obrazu. Aby mohly být zájmové objekty zařazeny do jednotlivých tříd je nutné je správně popsat. Existují dva typy popisu, kvantitativní a kvalitativní. První typ se zaměřuje na základní číselné charakteristiky jako je velikost, podlouhlost, kompaktnost nebo hodnota jasu. Druhý přístup zkoumá i vztahy mezi vlastnostmi objektů. Klasifikace je posledním krokem a úzce souvisí s popisem objektů. Je to proces, který objekty v obraze rozděluje na základě popisu do vybraných tříd.
PRAKTICKÁ APLIKACE
V dopravně inženýrské praxi lze využít výše zmíněné principy k získání celé řady informací, které lze pomocí běžně používaných postupů získat naopak jen velice těžko. Nejprve je však nutné pořídit vhodný videozáznam. Jednou z možností je pořízení videozáznamu ze země, případně z přilehlé výškové budovy. Výškové budovy ve vhodném místě se však z pravidla nenacházejí. Při pořízení ze země je nutné umístit kameru do vyvýšené perspektivy, abychom zabrali všechna vozidla v křižovatce, potažmo celou křižovatku. Můžeme tak kameru umístit na sloup VO, kde je však problém s potřebnými souhlasy dotčených orgánů a instalací, nebo využít teleskopické stožáry a obdobná zařízení, kde zase často bývá problém se stabilitou, případě transportem robustních konstrukcí.
Netradiční, avšak dynamicky se rozvíjejícím přístupem je pořízení videozáznamu pomocí UAV (bezpilotní letoun). Tento přístup má hned celou řadu výhod, ale přináší i jistá omezení a zvýšené nároky na obsluhu. Mezi hlavní výhody patří snadný transport (letoun se vleze do kufru osobního automobilu) a svoboda použití (za předpokladu dodržení platné legislativy, která se k provozu UAV vztahuje). Největší přínos využití této technologie ovšem spočívá v perspektivě záběru, která poskytuje dokonalý přehled o dění v křižovatce a zjednodušuje aplikaci výše zmíněné teorie. Vhodnost použití pro počítačové vidění je zapříčiněna především tím, že pozadí je relativně statické (po softwarovém stabilizování) a po něm se pohybují jasně ohraničená vozidla bez překryvů, navíc s vhodnou velikostí. Mezi nevýhody patří především relativně vysoká pořizovací cena, která však každým rokem znatelně klesá, a nutnost proškoleného personálu (obr. 1) s licencí u Úřadu pro civilní letectví (UCL).
ZPRACOVÁNÍ VIDEOZÁZNAMU POMOCÍ POČÍTAČOVÉHO VIDĚNÍ
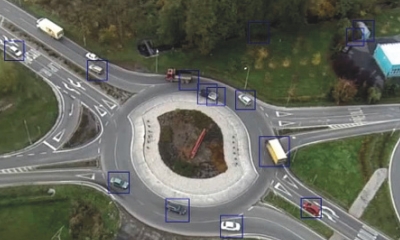
Teorie popsaná v první kapitole je převedena do praxe pomocí sofistikovaného software. Ten pracuje na principu klasifikátorů, které jsou schopny rozpoznat v obraze předměty, na které jsou nadefinovány. V našem případě se jedná o motorová vozidla. Na obr. 2 je výřez z videa, kde klasifikátor označil veškeré shluky pixelů, které považuje za vozidla. Je zřejmé, že došlo k celé řadě chyb. Ty je možno eliminovat několika způsoby. Jedním je zpřesňováním klasifikátorů, což je v podstatě dlouhodobý proces „učení“ těchto softwarových modulů. Druhým praktičtějším způsobem, je vymezení ploch, kde se obraz má vyhodnocovat. Tím se odstraní možné rušivé elementy, jako například parkoviště a navíc dojde ke snížení náročnosti na výpočetní výkon, protože je zpracováváno menší množství pixelů.
Pokud je spolehlivost klasifikátorů dostatečná, můžeme přistoupit k další fázi, tzv. trackingu. To nám umožní zjistit trajektorii vozidel v obraze (obr. 3). Pokud protíná virtuální brány, můžeme sledovat počet vozidel na jednotlivých vjezdech a výjezdech, ale také směr jednotlivých vozidel tedy, kterým pruhem do křižovatky vjely a kterým
vyjely. Díky znalosti optických vlastností kamery a geometrických rozměrů křižovatky je také možné tyto trajektorie transformovat do světových souřadnic. Díky navázání na časovou osu videozáznamu je pak možné vyhodnocovat rychlost vozidel.
ZÁVĚR
Použití technologie trasování vozidel na základě obrazové analýzy v kombinaci s bezpilotním průzkumem získáme zařízení, které bude schopno ve velice krátkém čase poskytnout velice detailní informace o průjezdu vozidel křižovatkou v množství, které je v současné době jiným způsobem nedostupné. Následně pak bude možné provádět kalibraci a validaci mikrosimulačních modelů, provádět bezpečnostní analýzy, statistické modely a řadu dalších aplikací.
LITERATURA:
• KOZINA, L. Detekce a počítání automobilů v obraze (videodetekce). Brno: Vysoké učení technické v Brně, Fakulta elektrotechniky a komunikačních technologií, 2010. 60 s. Vedoucí diplomové práce Ing. Peter Honec, Ph.D.
• ADAMEC, V. Zpracování a rozpoznávání obrazu. Olomouc: Palackého univerzita v Olomouci, Přírodovědecká fakulta, Katedra informatiky, 2011. 43 s. Vedoucí bakalářské práce Mgr. Eduard Bartl, Ph.D.
• STRAKA, S. Segmentace obrazu. Brno: Masarykova univerzita, Fakulta informatiky, 2009. 57 s. Vedoucí diplomové práce Mgr. Radka Pospíšilová.
• Testy adativního Cannyho hranového detektoru [online]. Ostrava: Vysoká škola Báňská – Technická univerzita Ostrava, c2010. [cit. 28.1.2014]. Dostupné z: http://homel.vsb.cz/~sur096/ing/test_adapti_hranove_detekce/
RECENZE
Článek pojednává o využití analýzy obrazu při dopravně inženýrských úlohách. V první části jsou nastíněny základní teoretické kroky při analýze objektů, v druhé části jsou pak tyto principy aplikovány v praxi při analýze videozáznamu, který zachycuje vozidla projíždějící křižovatkou. Přínos článku vidím především v teorii analýzy obrazu a její aplikace v konkrétní dopravní úloze s důrazem na praktické výstupy, které lze pomocí počítačového vidění získat.
Recenzent: BcA. Tomáš Tichý,
APS Engineers s. r. o.
Application of Computer Vision in Traffic Engineering
The article first briefly summarizes computer vision theory, basic principles of detecting an object in a vision and the evaluation process of individual pixels. Another part describes the procedure of obtaining a suitable video record and practical application of theoretical principles presented in the introduction. The application of these principles results in obtaining the trajectory of a vehicle in time and O/D matrices.




NEJčtenější souvisejicí články (v posledních 30-ti dnech)
Nově zavedený dokument pro oblast protikorozní ochrany ocelových konstrukcí má název Technické kvalitativní podmínky sta...
Článek se ve dvou dílech zabývá řízením železniční dopravy. Problematika řízení železniční dopravy je v rámci jednotlivý...
V minulém roce médii proběhly informace typu, „kruhových objezdů je hodně“, „v některých případech jsou zbytečné a nesmy...
NEJlépe hodnocené související články
Na 6,5 kilometru dlouhém mezistaničním úseku dvoukolejné trati stavbaři odstranili vady snižující komfortní užívání trat...
říká v rozhovoru pro Silnice železnice Radim Čáp, ředitel divize 4 Metrostavu a zároveň člen představenstva, který má na...
Nově budovaný severní obchvat Opavy (I/11 Opava, severní obchvat - východní část) má výrazně ulevit dopravní situaci v m...
NEJdiskutovanější související články
Původní most v obci Podolsko postavený v letech 1847 – 1848 přestal počátkem dvacátých let minulého století vyhovovat do...
ArcelorMittal Ostrava prostřednictvím své dceřiné společnosti ArcelorMittal Distribution Solutions Czech Republic pokrač...
„Vnější pražský okruh se stane alfou a omegou tranzitní přepravy na území ČR,“ řekl Ing. Marcel Rückl, porad...



ISSN 1803-8441 | © Copyright 2002 - 2026 KONSTRUKCE Media, s.r.o.
Jakékoliv užití obsahu včetně převzetí, šíření či dalšího zpřístupňování článků a fotografií je bez souhlasu nakladatelství zakázáno.
KONSTRUKCE Media, s.r.o., se sídlem Starobělská 1133/5, 700 30 Ostrava, zapsaná v obchodním rejstříku vedeným u Krajského soudu v Ostravě, oddíl C, vložka 22003, Identifikační sídlo: 25851276 | Tel.: 597 317 578 | Fax: 597 579 166


