







 Zajímavosti Příprava certifikační metodiky dopravních aplikací využívajících GNSS systémy
Zajímavosti Příprava certifikační metodiky dopravních aplikací využívajících GNSS systémyPříprava certifikační metodiky dopravních aplikací využívajících GNSS systémy
Rubrika: Zajímavosti
V současné době není používání GNSS systémů již žádnou vzácností a běžně se tyto celosvětové satelitní systémy pro určení pozice objektu využívají i v dopravě – v rámci tzv. inteligentních dopravních systémů (ITS). Často se jedná o aplikace pro navigaci řidičů vozidel, sledování oběhu firemního vozového parku apod.

Pokud však budeme chtít využít GNSS systémy v kritických případech či aplikacích, kdy se jedná o bezpečnost přepravy osob, finanční transakce v dopravě, přepravu nebezpečného zboží apod., jsou kladeny vysoké požadavky na systémové parametry těchto aplikací. Pro takové využití bude třeba ITS aplikace certifikovat a prokázat tak splnění požadovaných systémových parametrů (budou popsány níže). Jedná se o certifikaci systémových parametrů celých aplikací (jejichž certifikace se v současné době řeší spíše sporadicky), nikoli jen o certifikaci jednotlivých zařízení (přijímačů GNSS signálu) nebo certifikaci signálu družicové navigace, pro něž v současné době již existují certifikační metody a systémy.
Aplikovaný výzkum v této oblasti probíhá na ČVUT v Praze, Fakultě dopravní (FD) ve spolupráci s laboratoří e-Ident (společná laboratoř FD ČVUT a společnosti Telematix Services a. s.). Projekt probíhá jako úkol Programu rozvoje metrologie. Zadavatelem úkolu s názvem „Analýza technických a metrologických požadavků na zařízení pro přijímače GNSS a jejich provoz“ je Úřad pro technickou normalizaci, metrologii a státní zkušebnictví ČR (ÚNMZ). Úkol je rozvržen na období let 2008 až 2011. Cílem úkolu není jen samotná příprava metodiky certifikace ITS aplikací využívajících GNSS systémy, ale také zřízení příslušného certifikačního pracoviště, tj. laboratoře pro provádění praktických certifikací dle postupně vznikajících závazných norem a předpisů.
PŘÍPRAVA CERTIFIKAČNÍ METODIKY
II. etapa úkolu, realizovaná v roce 2009, se věnovala přípravě metodiky certifikačních procesů dvou pilotních ITS aplikací. Byly vybrány ITS aplikace v silniční dopravě – průjezd virtuální branou a identifikace projetého úseku. Obě aplikace je možné využít např. v systému elektronického mýta na pozemních komunikacích ve městě i v extravilánu. Cílem certifikace těchto aplikací je zajistit bezpečnou a garantovanou polohovou a časovou identifikaci vozidla (resp. osoby nebo nákladu) s vozidlovou palubní jednotkou.
Obě sledované ITS aplikace lze ze systémového hlediska charakterizovat pomocí následujících komponent:
- vozidlová palubní jednotka (OBU) využívající GNSS systém;
- systém pro záznam a přenos informací z palubní jednotky do střediska ITS systému;
- digitální mapa obsahující trasy všech sledovaných pozemních komunikací (umístěná v palubní jednotce nebo ve středisku ITS systému);
- informace o virtuálních branách (resp. o sledovaných úsecích) obsažená v digitální mapě nebo databáze s vazbou na digitální mapu;
- aplikace vyhodnocující průjezd virtuální branou nebo projetí úseku vozidlem (umístěná v palubní jednotce nebo ve středisku ITS systému) + výstupní informace.
Postup certifikace ITS aplikací
Metodika každé certifikované aplikace vychází z obecné metody pro posuzování aplikací a garanci příslušných systémových parametrů, která byla v rámci úkolu připravena a posuzuje všechny stanovené systémové parametry aplikací. Jedná se o následující parametry:
- přesnost – stupeň shody mezi měřenou a definovanou hodnotou parametru/ procesu/funkce;
- spolehlivost – schopnost systému plnit požadované funkce bez přerušení během daného postupu v průběhu definovaného časového intervalu;
- dostupnost – schopnost systému plnit požadované funkce při inicializaci (spuštění) systému/procesu dle daného postupu;
- kontinuita (spojitost) – schopnost systému plnit požadované funkce/procesy bez (neplánovaného) přerušení (maximální povolená délka přerušení je předem definována) během daného postupu (nebo definovaného časového intervalu);
- integrita – schopnost systému včasně a bezchybně informovat uživatele, že systém nemůže být použit pro operace daného postupu;
- bezpečnost – schopnost systému zajistit, že v případě vzniku poruchy nedojde k poškození systému nebo k materiálním ztrátám či ztrátám na lidském životě (ztráty vycházejí z provedené analýzy a klasifikace rizik).
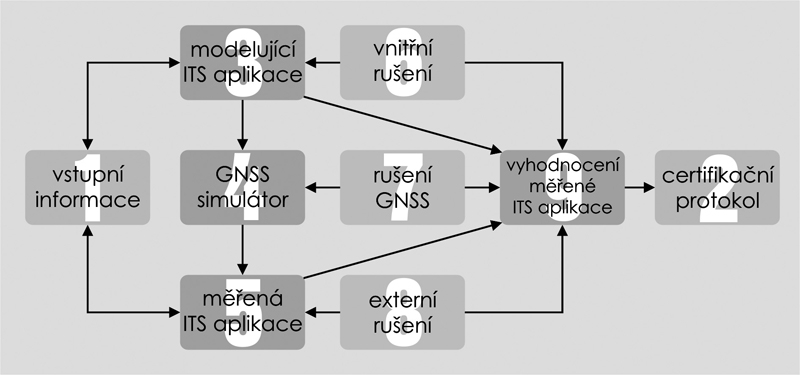
Obecnou metodu pro posuzování aplikací a garanci příslušných systémových parametrů představuje univerzální certifikační systém pro aplikace využívající GNSS systémy, který je přehledně znázorněn na obr. 1.
Postup certifikace ITS aplikace pak obecně spočívá v následujících krocích:
- definování vstupních podmínek pro ITS aplikaci (vstupní informace – blok 1 na obr. 1); tento blok zajišťuje, že jak zařízení modelující ITS aplikaci (blok 3), tak reálné testované zařízení (blok 5) používají stejné vstupní informace;
- definování ideálně fungující (modelové) ITS aplikace (blok 3) – tj. aplikace detekující průjezd virtuální branou nebo průjezd definovaným úsekem na základě modelové trajektorie;
- definování statistik rušení – a to jak vnitřního rušení ITS aplikace (blok 6, jedná se o rušení pro celou množinu testovaných vozidel nebo OBU jednotek), tak rušení vlastního GNSS signálu (blok 7), tak externího rušení (blok 8); rušení reprezentuje náhodné chyby s daným rozložením pravděpodobnosti jako vstup do modelové i testované ITS aplikace nebo do simulace GNSS signálu;
- aktivace měřené (certifikované) ITS aplikace (blok 5) – všech komponent systému popsaných výše;
- testování měřené ITS aplikace simulovaným GNSS signálem (blok 4, využití GNSS simulátoru) pro všechny definované situace (vstupní podmínky – blok 1) se snahou pokrýt veškeré situace, které mohou nastat, s možností fiktivních tras v elektronické mapě + záznam výstupních informací z ITS aplikace + paralelní testování modelové ITS aplikace při shodných vstupech;
- reálné testování v terénu pro vybrané (dostupné) situace + záznam výstupních informací z ITS aplikace + paralelní testování modelové ITS aplikace při shodných vstupech;
- vyhodnocení shody výstupních informací z příslušné ITS aplikace s výstupními informacemi z modelové (ideálně fungující) ITS aplikace pro dané vstupní podmínky a pro daná rušení (blok 9);
- zpracování výsledků měření do certifikačního protokolu (protokolu o měření) a výsledné vyhodnocení garance systémových parametrů ITS aplikace (blok 2); garance systémových parametrů ITS aplikace musí být statisticky ověřena na značném počtu měření tak, aby bylo možno sledované vlastnosti garantovat za daných statistickýchparametrů.
Metodika testování zvolených ITS aplikací
Jak již bylo naznačeno v úvodu, pro pilotní testování byly vybrány dvě ITS aplikace v silniční dopravě:
- identifikace průjezdu vozidla virtuální branou (portálem);
- identifikace projetého úseku vozidlem.
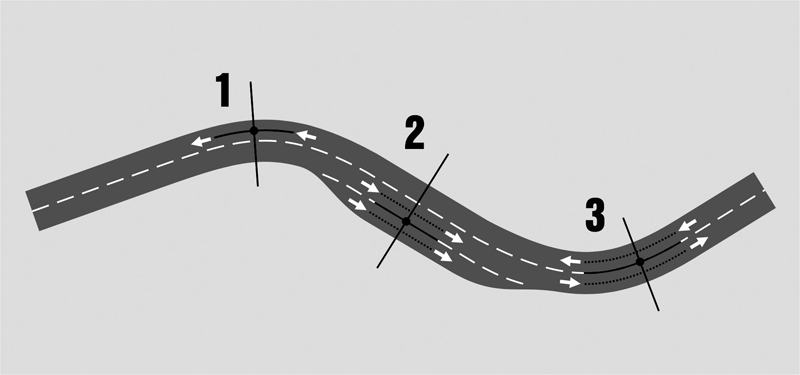
Virtuální brána je konkrétní příčný profil pozemní komunikace, ve kterém zjišťujeme průjezd vozidel pomocí informací z GNSS systémů, např. za účelem zpoplatnění jízdy. Název je odvozen od fyzického portálu (brány), např. vybavené zařízením pro DSRC komunikaci pro identifikaci vozidel v rámci pozemních mýtných systémů provozovaných např. v ČR nebo Rakousku. Využitím virtuálních bran lze rozšířit systém pozemního mýta o analogický systém nevyžadující výstavbu portálů. Často bývá průjezd branou považován za jízdu určitým zpoplatněným úsekem komunikace.
Referenční bod průjezdu virtuální branou můžeme definovat jako půdorysný průsečík osy jízdního pruhu (příp. osy skupiny stejnosměrných jízdních pruhů nebo osy celé komunikace) s rovinou virtuální brány (příčný profil – rovina kolmá na trajektorii komunikace v definovaném místě sledování průjezdu). Na obr. 2 je zakreslena pozice bodů průjezdu, uvažujeme-li je jednosměrně (osa jízdního pruhu v případě 1 nebo skupiny pruhů v případě 2) nebo obousměrně (případ 3, kdy je pro oba směry definován jeden bod v ose komunikace). Pokud vymezíme body průjezdu směrově (případy 1 nebo 2), zajistíme a priori vyšší přesnost určení polohy bez ohledu na přesnost GNSS systémů.
Projetý úsek vozidlem můžeme definovat jako úsek pozemní komunikace ohraničený body A a B. V případě, že se zaznamenává jízda vozidla úsekem, vztahuje se k tomuto záznamu oproti virtuální bráně mnohem více informací – pozice je ve vozidle určována prakticky po celou dobu jízdy sledovaným úsekem. K dispozici je tak např. ujetá trajektorie, díky které je (oproti průjezdu virtuální branou) možné mnohem přesněji určit, kterým úsekem vozidlo jede. Doba aktivity události tedy není krátká, resp. nulová. Pokud se vozidlo nachází na počátku sledovaného úseku, jistota přiřazení k úseku může být srovnatelná s jistotou určení bodu průjezdu (tj. v případě virtuální brány). S postupnou jízdou úsekem by se přesnost měla zvyšovat tak, jak se zvyšuje počet informací z GNSS systémů o poloze vozidla. Na konci úseku by měla být mnohem vyšší jistota přiřazení vozidla do správného úseku. Předpokládá se, že definitivní informace o jízdě vozidla úsekem bude do ITS systému z vozidla odeslána až poté, co vozidlo opustí sledovaný úsek.
Jednotlivé sledované úseky jsou vymezeny svou geografickou polohou v územním prostoru. Jejich definice a následné zanesení do digitálních mapových podkladů dopravní či komerční infrastruktury je možné jako přesný popis trajektorie daného úseku komunikace. Další z možností je definice územní plochy, ve které se úsek komunikace vyskytuje (případ 2). Vhodné je provázání úseků s mapovou vrstvou pozemních komunikací, ve které mohou být sledované úseky znázorněny přímo na úsecích zanesených v mapě.
V souladu se zvoleným postupem certifikace ITS aplikací jsou definovány vstupní podmínky pro ITS aplikaci (blok 1 na obr. 1), ať už se jedná o identifikace průjezdu vozidla virtuální branou nebo o identifikaci projetého úseku vozidlem. Vstupní podmínky vycházejí mj. z běžných podmínek provozu v České republice nebo v Evropské unii. Jedná se o konkrétní podmínky z hlediska směru a rychlosti jízdy, konfigurace jízdních pruhů na komunikaci, poloměru odbočení, výškové a sklonové poměry, hustoty vozidel začleněných do ITS systému apod. Velký důraz se klade na prověření sousedních geograficky blízkých paralelních komunikací, příp. geograficky blízkých virtuálních bran. Definované vstupní podmínky by měly pokrýt veškeré situace z provozu, které mohou nastat. Je možné definovat např. i fiktivní místa (brány) v terénu – při simulaci GNSS signálu lze pro testování totiž využít reálné i fiktivní brány. Všechny fiktivní brány je pak pro testování nutné zanést do digitálních map ITS aplikace. V případě, že nejsou digitální mapy nebo další externí informace pro ITS aplikaci součástí testované ITS aplikace, zařazují se rovněž mezi vstupní podmínky pro ITS aplikaci.
Při definování modelové ITS aplikace (blok 3 na obr. 1) musí být vytvořen model ideální trajektorie vozidla, který je jedním ze vstupů GNSS simulátoru. Toho lze docílit dvěma způsoby:
- vytvořením modelu trajektorie jízdy vozidla podle mapových podkladů – geometrickým vyjádřením trajektorie jízdy a geografické pozice vybraného bodu trajektorie;
- změřením trajektorie při reálné jízdě vozidla GNSS přijímačem za popsaných podmínek (např. NMEA formát záznamu) a následným vytvořením modelu trajektorie; k tomu je zapotřebí certifikovat změřený GNSS signál, protože bude sloužit jako signál testovací.
Mezi testované statistiky vnitřního rušení ITS aplikace (blok 6 na obr. 1) můžeme zařadit např. následující:
- výpadky informací z jednotlivých měření;
- ztráta části naměřené trajektorie vozidla;
- vložení části nesmyslné trajektorie vozidla;
- periodické opakování stejné chyby.
Jednotlivé statistiky rušení GNSS signálu (blok 7 na obr. 1) lze nastavit v prostředí GNSS simulátoru. Konkrétní testované statistiky rušení GNSS signálu jsou uvedeny v úvodu v kroku 3. Na příjem GNSS signálu mají mj. vliv okolní překážky v terénu kolem komunikace, příp. i překážky nad komunikací – les, skály (hluboké údolí), zárubní zdi, protihlukové stěny a valy, městská zástavba různé výšky a vzdálenosti od komunikace, podjezdy apod. V případě delšího zastínění GNSS signálu (tunely, parkoviště v krytých objektech apod.) se a priori předpokládá dočasná ztráta funkce ITS aplikace, měření v těchto prostorech není třeba provádět.
Testování vnějšího rušení ITS (blok 8 na obr. 1) se provádí přímo na zařízení (vozidlové palubní jednotce) testované ITS aplikace. Mezi testované statistiky vnějšího rušení ITS aplikace můžeme zařadit např.:
- radiové rušení na mezi-frekvenčním kmitočtu (selektivní rušení přijímače externím kanálem);
- rušení vyjmutím napájení.
Jako základní výstupní veličiny ITS aplikace identifikující průjezd vozidla virtuální branou nebo sledovaným úsekem lze označit následující čtyři informace (měřené veličiny):
- označení vozidla (např. identifikační kód vozidlové jednotky); tato informace nezávisí na GNSS systému;
- označení virtuální brány nebo úseku, který vozidlo projelo – identifikační kód brány/ úseku nebo označení komunikace + kilometrická pozice na komunikaci, apod.; označení brány/úseku určí program ITS aplikace na základě zjištěných dat GNSS o poloze vozidla během jízdy vozidla a databáze virtuálních bran/úseků;
- označení směru jízdy vozidla přes virtuální bránu ve vztahu k definovanému základnímu směru jízdy, to je např. směr s narůstající kilometráží úseku (binární veličina – vozidlo projíždí souhlasně s definovaným směrem, nebo opačným směrem); označení směru určí program ITS aplikace na základě zjištěné posloupnosti dat GNSS o poloze vozidla během jízdy vozidla a databáze virtuálních bran/úseků;
- přesný čas události – je možné získat z informací z GNSS systému, časový údaj je vysílán ze satelitů GNSS; v případě jízdy úsekem se jedná o dva údaje, buďto dva absolutní časy vymezující vjezd do úseku a jeho opuštění, nebo jeden absolutní časový údaj (např. vjezd do úseku) a doba trvání jízdy úsekem.
V případě ITS aplikace, která identifikuje průjezd vozidla úsekem komunikace, lze identifikovat navíc další dvě nadstavbové výstupní informace (veličiny):
- podíl na sledovaném úseku vyjádřený např. v procentech – v některých případech může být vhodné zaznamenat, jak velkou část úseku vozidlo projelo, příp. zda projelo celý sledovaný úsek; např. při zpoplatnění jízdy po silnicích I. až III. tříd se v případě snahy spravedlivě zpoplatnit skutečně ujetou dráhu vozidel může jevit jako vhodné nenastavovat úseky mezi každými odbočkami na polní nebo lesní cesty či vjezdy do objektů, ale nastavit úseky pouze mezi významnějšími uzly sítě a v případě odbočení vozidla uprostřed zpoplatněného úseku mimo tento úsek inkasovat pouze za jeho projetou část;
- pozice vjezdu do úseku a jeho opuštění vyjádřitelné např. v geografických souřadnicích nebo v kilometráži; lze nastavit, že veličina je nenulová pouze v případě, kdy vozidlo vjede do sledovaného úseku (nebo jej opustí) mimo krajní místa úseku (a podíl na sledovaném úseku tedy není 100 %); tato veličina není nezbytně nutná pro systém elektronického mýta, může však pomoci odhalit případné chyby v identifikaci úseku pro konkrétní případy.
Má-li být zajištěna správná funkce ITS aplikace, musí být garantována správnost těchto všech výstupních informací. Z hlediska informací vycházejících z využití systémů GNSS je irelevantní první veličina, tj. informace o označení vozidla. Ostatní výstupní veličiny ITS aplikace závisejí na veličinách poloha a čas získaných z GNSS systémů a je možné je testovat při využití GNSS simulátoru.
Aby byla zajištěna garance správného výstupu ITS aplikace, musí program vyhodnocujícíprůjezd vozidla v rámci ITS aplikace zajistit, že při průjezdu vozidla skutečnou pozicí virtuální brány, resp. sledovaného úseku:
- bude vyhodnocen průjezd vozidla touto branou (resp. tímto úsekem);
- nebude vyhodnocen průjezd vozidla jinou blízkou branou (resp. jiným blízkým úsekem);
- nebude vyhodnocen průjezd vozidla branou/úsekem v opačném směru;
- nebude vyhodnoceno více průjezdů stejnou branou (resp. stejným úsekem) v krátkém čase.
Krok aktivace měřené ITS aplikace (blok 5 na obr. 1) obnáší instalaci a spuštění celé testované ITS aplikace včetně GNSS jednotky a programu na zpracování dat a generování výstupů. Testovaná vozidlová palubní jednotka je instalována buďto přímo do vozidla na praktické testování, anebo je připojena na GNSS simulátor pro testování v laboratoři (zde se předpokládá větší počet vozidlových jednotek).
Vlastní testování probíhá na GNSS simulátoru v laboratoři, a také reálně přímo v terénu. Testování měřené ITS aplikace simulovaným GNSS signálem probíhá pro všechny situace definované vstupními podmínkami a pro všechny zadané možnosti rušení. Zaznamenávány jsou výstupní informace z ITS aplikace, které byly popsány výše. Při testování se provádí dostatečné množství měření – testuje se více jednotek testované ITS aplikace, testují se na těchto jednotkách postupně všechny vstupní podmínky, může proběhnout i více měření pro stejné vstupní podmínky a identické jednotky testované ITS aplikace. U veškerých měření probíhá paralelně i testování modelové ITS aplikace pro stejné vstupní podmínky a stejná vnitřní rušení ITS aplikace. Vybrané vstupní podmínky, které jsou dostupné v reálné situaci, jsou otestovány přímo v terénu. Záznam je obdobný jako při měření na simulátoru. Opět zde probíhá paralelně i testování modelové ITS aplikace. Výstupem všech měření je protokol o měření.
Po provedených měřeních se porovnávají výstupy z testované ITS aplikace s výstupy modelové ITS aplikace pro dané vstupní podmínky a pro daná rušení. Základním kritériem hodnocení výstupních veličin je shoda nebo neshoda jednotlivých výstupních veličin s modelovým výstupem. Jako neshoda je považován i případ, kdy místo jedné identifikace průjezdu je vozidlo identifikováno vícekrát. V případě časové informace je základním kritériem hodnocení odchylka výstupního času od přesného času průjezdu.
Velké množství testů podléhá statistickému zpracování, které zohledňuje jednotlivé vstupní situace a podmínky rušení. Výstupem je pak pravděpodobnost správného změření průjezdu vozidla, a také pravděpodobnost chyb. Na základě výsledných statistických hodnot je možné vyhodnotit garanci systémových parametrů ITS aplikace.
VYUŽITÍ GNSS SIMULÁTORU
Pro zajištění pilotních i řádných testů a splnění cíle úkolu se na FD ČVUT připravuje zřízení certifikačního pracoviště vozidlových jednotek, tj. laboratoře pro provádění praktických certifikací dle postupně vznikajících závazných norem a předpisů. Laboratoř vzniká v těsné vazbě na laboratoř e-Ident. Stěžejní funkcí budované laboratoře je simulování GNSS signálu jako vstupu při testovaní ITS aplikací tak, aby byly známy všechny vstupní podmínky a garance systémových parametrů ITS aplikace a tím mohla být statisticky ověřena na dostatečném počtu měření.
Laboratoř je vybavena simulátorem Spirent GSS řady 8000. Jeho hlavní předností je možnost simulovat současně až 10 družic GNSS a simulovat definovanou trasu. Navíc lze simulovaný GNSS signál v mnoha směrech modelovat, a simulovat tak hraniční podmínky. Jedná se o následující parametry, které lze upravovat:
- rozložení družic – různá konstelace družic GNSS pro různá časová období;
- vysílací výkon jednotlivých družic;
- vícecestný příjem signálu (multipath);
- odraz signálu;
- zastínění signálu;
- atmosférické vlivy na signál;
- vliv antény přijímače (modelování) – různé parametry antény, různé pozice antény na vozidle, případně více antén, rušení zakrytím části GNSS antény;
- parametry vozidla – maximální rychlost, maximální zrychlení, maximální úhlová rychlost, maximální úhlové zrychlení apod.;
- modelování vstupů z čidel vozu.
Konstelace satelitů
Přesnost určení pozice pomocí GNSS technologie závisí na jedné straně na přesnosti měření jednotlivých pseudovzdáleností, na druhé straně i na geometrické konfiguraci dostupných satelitů. Vyjádření pomocí celočíselné hodnoty se nazývá DOP (Dilution of Precision, rozptyl přesnosti). Používá se několik dílčích DOP parametrů [3]:
- GDOP: Geometický DOP (pozice v prostoru, zahrnující časový posun);
- PDOP: Prostorový DOP (pozice v prostoru);
- HDOP: Horizontální DOP (horizontální složka pozice);
- VDOP: Vertikální DOP (vertikální složka pozice);
- TDOP: Časový DOP (časová přesnost).
Když jsou viditelné satelity blízko sebe na obloze, geometrie je slabá a hodnota DOP je vysoká. Když jsou satelity od sebe daleko, geometrie je silná a hodnota DOP je nízká. Nízká hodnota DOP reprezentuje vyšší přesnost určení pozice.
Zatímco hodnota HDOP se mění se zeměpisnou polohou jen málo, hodnota VDOP se zeměpisnou šířkou mění hodně. V zeměpisné šířce ± 56° dosahuje svého minima a s dalším zvyšováním zeměpisné šířky pak výrazně roste. Tento nárůst chyby ve vyšších zeměpisných šířkách je způsoben tím, že po překročení zeměpisné šířky, která je rovna inklinaci dráhy, již družice nedosahují nadhlavníku a kulminují ve stále nižších elevacích. Třídimenzionální chyba určení polohy prakticky sleduje průběh dominantní chyby výšky.
Pomocí simulačního nástroje lze modelovat různé geometrické rozmístění satelitů typické například pro různou zeměpisnou šířku. Lze simulovat stavy s vysokou i nízkou úrovní DOP ukazatelů. U každého ze satelitů lze simulovat libovolně hladinu úrovně signálu, případně jeho vyřazení z provozu a navodit tak situaci, kdy je vysílán signál jen u satelitů. Kombinací těchto nastavení je možné sestavit mnoho různých testů pro testování příjmu GNSS signálu v závislosti na konstelaci satelitů.
Této vlastnosti se rovněž dá využívat při simulaci konkrétní konstelace družic GNSS v definovaný časový okamžik v minulosti. Jedná se například o znovu navození situace, ve které došlo v aplikaci nebo v zařízení k chybě. Toto je umožněno pro GPS signál, který se řídí tzv. GPS týdny. Pro každý GPS týden je generován soubor Almanac, který definuje aktuální pozice všech GPS družic. Tyto informace jsou volně dostupné na internetu. Tento soubor se importuje do simulačního SW nástroje a postavení družic poté již odpovídá požadované době.
Generování GNSS signálu
Proces generování GNSS signálu prostřednictvím simulátoru probíhá v několika krocích (a je zobrazen na obrázku 6):
- Operátor v simulačním programu nastaví průběh trasy (manuálně nebo předem připraveného souboru polohových dat, např. NMEA údaje) a veškeré parametry generovaného signálu (např. počet dostupných družic, jejich výkon, konstelaci družic; odrazy signálu; reliéf okolí apod. – parametry jsou definovány dále) v závislosti na druhu prováděného testu.
- Proprietární data jsou odeslána do generátoru GNSS signálu, který definovaný signál generuje a ten je přes anténu vyzařován do prostředí.
- Testované zařízení s aplikací je umístěno do dosahu generovaného signálu a je provedeno vlastní testování zařízení/ aplikace.
- Na základě dat zjištěných během testů je provedeno vyhodnocení (např. porovnání NMEA logu ze simulátoru a NMEA logu z testovaného zařízení).
Výsledky testování
Průběhy testů byly zaznamenávány do „log souboru“ uloženého přímo v HW jednotce. Na základě těchto dat probíhalo další zpracování mimo HW jednotku. Zaznamenávaly se následující údaje o průjezdu virtuální mýtnou branou:
- čas průjezdu;
- ID a popis brány (definované souřadnice a azimut).
Každý výsledek byl poté klasifikován jako „vyhověl“ nebo „nevyhověl“ podle následující kategorizace:
- vyhověl, pokud platí všechny následující podmínky:
− je identifikována brána na pojížděné komunikaci;
− není identifikována brána na jiné blízké komunikaci;
− není identifikována libovolná protisměrná brána;
− není vyhodnoceno více průjezdů stejnou branou během jednoho testu, - nevyhověl, pokud platí alespoň jedna z následujících podmínek:
− není identifikována brána na pojížděné komunikaci;
− je identifikována brána na jiné blízké komunikaci;
− je identifikována libovolná protisměrná brána;
− je vyhodnoceno více průjezdů stejnou branou během jednoho testu.
Uvedené podmínky vycházejí z požadavků na výstupní veličiny ITS aplikace definovanýchvýše.
Vlastní výsledky prováděných testů jsou uvedeny v tabulce 1.
Na základě měření bylo prokázáno, že výsledky identifikace průjezdu se liší pro různé parametry GNSS signálu, prostředí i další vlivy na jeho příjem. Relativně nízké procento úspěšnosti načtení pojížděné brány může být způsobeno vysokou citlivostí SW v jednotce, za tohoto stavu by jednotka nebyla schválena pro použití v systému EFC. Lze předpokládat, že pro využití jednotky v telematických aplikacích bude požadováno vyšší procento úspěšnosti pro negativní detekci protisměrné nebo sousední brány.
Při provedení dostatečně velkého množství měření ukazují výsledné hodnoty pravděpodobnost shody vlastností testované OBU jednotky s požadovanými vlastnostmi měřených aplikací.
|
Tabulka 1 – Výsledky pilotního testování virtuálních bran v závislosti na úseku, směru a druhu testu |
|||
| Úsek a směr | Druh testu | Vyhověl [%] | Nevyhověl [%] |
| II/605 tam | Pojížděná brána | 60,0 | 40,2 |
| Protisměrná brána | 100,0 | 0,0 | |
| Sousední brána v souhlasném směru | 97,3 | 2,7 | |
| Sousední protisměrná brána | 98,7 | 1,3 | |
| II/605 zpět | Pojížděná brána | 50,7 | 49,3 |
| Protisměrná brána | 98,7 | 1,3 | |
| Sousední brána v souhlasném směru | 96,0 | 4,0 | |
| Sousední protisměrná brána | 100,0 | 0,0 | |
| R5 tam | Pojížděná brána | 65,5 | 34,5 |
| Protisměrná brána | 96,4 | 3,6 | |
| Sousední brána v souhlasném směru | 100,0 | 0,0 | |
| Sousední protisměrná brána | 100,0 | 0,0 | |
| R5 zpět | Pojížděná brána | 69,1 | 30,9 |
| Protisměrná brána | 100,0 | 0,0 | |
| Sousední brána v souhlasném směru | 100,0 | 0,0 | |
| Sousední protisměrná brána | 100,0 | 0,0 | |
| Celkem | Pojížděná brána | 60,4 | 39,6 |
| Protisměrná brána | 98,8 | 1,2 | |
| Sousední brána v souhlasném směru | 98,1 | 1,9 | |
| Sousední protisměrná brána | 99,6 | 0,4 | |
ZÁVĚR
Na základě výsledků pilotních testů a plánovaného dalšího testování v letošním i příštím roce bude možné sumarizovat definitivní obecný certifikační postup. Dle výsledků z pilotních testů lze stanovit nároky na budoucí provádění testů.
V dalších testech bude zásadní roli hrát volba vhodné kombinace a počtu testů pro jednotlivé vlastnosti signálu a prostředí. Dále je nutný ústup od předdefinovaných scén okolního prostředí a atmosféry v simulátoru a definice vlastních scén. Dále je nutné testovat další vnější i vnitřní vlivy na GNSS signál, stejně tak předpokládáme testování většího počtu bran během jednoho testu – souhlasných, protisměrných i v jiných směrech (např. při kolmém či šikmém křížení komunikací). Výsledky testování by poté měly být interpretovány v závislosti na parametrech GNSS signálu a vlivů na GNSS signál.
V případě nevyhovujících výsledků lze do budoucna uvažovat o možnostech zpřesňování určení pozice pomocí dalších systémů:
- využití dalšího GNSS systému vedle systému GPS – např. GLONASS nebo budovaný evropský systém GALILEO;
- využití systému SBAS – např. evropského systému EGNOS;
- využití systému GBAS – např. systému CZEPOS provozovaného v prostředí ČR Českým úřadem zeměměřickým a katastrálním; tento systém poskytuje uživatelům GPS korekční data pro přesné určení pozice na území České republiky; CZEPOS spravuje a provozuje Zeměměřický úřad jako součást geodetických základů České republiky.
V případě testování a simulace v laboratorním prostředí korekční stanoviště příliš nevyužijeme, neboť zkoušíme, do jaké míry jsou aplikace spolehlivé v závislosti na přijímaném GNSS signálu.
Pokud bychom však prováděli testy v reálném prostředí, kdybychom testovali ve vozidlech a přijímali reálný signál GNSS, potom bychom tato korekční data mohli využívat, abychom zvýšili přesnost signálu a tudíž i snížili pravděpodobnost chyby. Nicméně toto by vyžadovalo poměrně rozsáhlou přípravu.
LITERATURA:
[1] Analýza technických a metrologických požadavků na zařízení pro přijímače GNSS a jejich provoz, Výroční zpráva 2008
[2] Analýza technických a metrologických požadavků na zařízení pro přijímače GNSS a jejich provoz – II. etapa, Výroční zpráva 2009
[3] Essentials of Satellite Navigation, Compendium, uBlox, Switzerland, 2007
[4] Prezentační materiály společnosti Spirent Communications Ltd.
[5] Aplikace SimGEN, Výrobce Spirent Communications Ltd.
[6] Svítek, M.: Dynamical Systems with Reduced Dimensionality, Neural Network World edition, II ICR AS CR a ČVUT FD, Praha 2006, ISBN: 80-903298-6-1, EAN: 978-80-903298-6-7
Preparation of certification methodology of transport applications using GNSS systems
Current trend of GNSS system development and its applications means great perspective in future for transport and transit processes, especially when using these applications also in places where high requirements are places for system parameters of these applications, i.e. for example ion cases when it concerns the safety of people and transport itself, financial transactions, etc. for such use these ITS applications will have to be certified and prove the compliance with the required parameters.
The article deals with preparation method of ITS application certification using GNSS systems which takes place within applied research at CTU in Prague, Faculty of Transportation Science (FTS) in cooperation with the e-Ident laboratory (common laboratory of FTS at CTU and the company Telematix Services, a. s.). the methodology also includes testing the application on GNSS simulator. For pilot test two applications in road transport were selected – transit through a virtual gate and identification of driven section.
![Obr. 3 – Zobrazení geometrické konfigurace satelitů GNSS [4]](/PublicFiles/UserFiles/images/SZ/2010/S310/obrazky_P1/800x800_lok03.jpg)
![Obr. 4 – Pozice a pohyb satelitů v čase [5]](/PublicFiles/UserFiles/images/SZ/2010/S310/obrazky_P1/800x800_lok04.jpg)
![Obr. 5a – Zobrazení přijímaných úrovní signálů a jejich možné nastavení [5]](/PublicFiles/UserFiles/images/SZ/2010/S310/obrazky_P1/800x800_lok05.jpg)
![Obr. 5b – Zobrazení přijímaných úrovní signálů a jejich možné nastavení [5]](/PublicFiles/UserFiles/images/SZ/2010/S310/obrazky_P1/800x800_lok06.jpg)
![Obr. 6 – Schéma průběhu testování [4]](/PublicFiles/UserFiles/images/SZ/2010/S310/obrazky_P1/800x800_lok07.jpg)

NEJčtenější souvisejicí články (v posledních 30-ti dnech)
Článek se ve dvou dílech zabývá řízením železniční dopravy. Problematika řízení železniční dopravy je v rámci jednotlivý...
V minulém roce médii proběhly informace typu, „kruhových objezdů je hodně“, „v některých případech jsou zbytečné a nesmy...
Na podzim roku 2015 byl zprovozněn další segment pražského dopravního systému pro automobilovou dopravu – tunelový kompl...
NEJlépe hodnocené související články
Na 6,5 kilometru dlouhém mezistaničním úseku dvoukolejné trati stavbaři odstranili vady snižující komfortní užívání trat...
říká v rozhovoru pro Silnice železnice Radim Čáp, ředitel divize 4 Metrostavu a zároveň člen představenstva, který má na...
Nově budovaný severní obchvat Opavy (I/11 Opava, severní obchvat - východní část) má výrazně ulevit dopravní situaci v m...
NEJdiskutovanější související články
Původní most v obci Podolsko postavený v letech 1847 – 1848 přestal počátkem dvacátých let minulého století vyhovovat do...
ArcelorMittal Ostrava prostřednictvím své dceřiné společnosti ArcelorMittal Distribution Solutions Czech Republic pokrač...
„Vnější pražský okruh se stane alfou a omegou tranzitní přepravy na území ČR,“ řekl Ing. Marcel Rückl, porad...



ISSN 1803-8441 | © Copyright 2002 - 2026 KONSTRUKCE Media, s.r.o.
Jakékoliv užití obsahu včetně převzetí, šíření či dalšího zpřístupňování článků a fotografií je bez souhlasu nakladatelství zakázáno.
KONSTRUKCE Media, s.r.o., se sídlem Starobělská 1133/5, 700 30 Ostrava, zapsaná v obchodním rejstříku vedeným u Krajského soudu v Ostravě, oddíl C, vložka 22003, Identifikační sídlo: 25851276 | Tel.: 597 317 578 | Fax: 597 579 166


