








Detekce jízdní stability nákladních vozidel
Rubrika: Zajímavosti
V rámci probíhajícího projektu na Fakultě dopravní ČVUT v Praze je řešena problematika stability vozidel se specifickými vlastnostmi – zejména nákladních vozidel se speciálními nástavbami, vozidel po přestavbách či vozidel pro přepravu sypkých a tekutých nákladů. Projekt je zaměřen zejména na detekci aktuálních jízdních vlastností vozidla, detekci pohybu nákladu a následnou predikci nehodových stavů. V počátcích vývoje tohoto systému stála myšlenka vývoje školícího, podpůrného systému pro řidiče profesionály.

ÚVOD
Kvalita jízdní dynamiky vozidla je determinována zejména ovladatelností a stabilitou. Stabilitu vozidla je možno vnímat ze dvou pohledů – jako stabilitu směrovou, tedy odolnost proti ztrátě ovladatelnosti v podélné rovině, a stabilitu v rovině příčné, tedy odolnost proti převrácení. Stabilitu vozidla v podélné i příčné rovině ovlivňuje mnoho faktorů, jsou jimi prvky samotné konstrukce vozidla (rozměrové a hmotnostní charakteristiky, poloha těžiště, druh a kvalita odpružení ad.), dále pak parametry komunikace, klimatické podmínky a v neposlední řadě lidský faktor jako řídící a kontrolní organismus. U vozidel nákladních pak do této problematiky zasahuje i vliv nákladu – jeho hmotnost, hmotnostní rozložení v objemu, možnost pohybu těžiště (tekuté, sypké, živé náklady). Rozhodující vlastnosti pro jízdní dynamiku jsou do vozidla vneseny již během jeho konstrukce, jsou však v průběhu životnosti ovlivňovány samotným provozem, opravami aj.
V současné době existuje mnoho systémů, které kvalitu jízdní dynamiky, ve smyslu ovladatelnosti a stability, podporují. Jedná se zejména o systémy antiblokovací (ABS), elektronické stabilizační systémy (ESC/ESP), systémy regulace prokluzu kol (ASR) a další. Tyto procházejí neustálým rozvojem, jsou rozšiřovány o další snímače (např. snímače zatížení ložné plochy, gyroskopy) a tedy rozšiřovány o další funkce. U nákladních vozidel je těmito systémy aktivní bezpečnosti monitorována také stabilita proti převrácení – např. pomocí algoritmu srovnávajícího zrychlení, které působí v příčné rovině, s prahovou hodnotou zrychlení, která je považována za kritickou (nicméně konkrétní provedení řídícího algoritmu se vždy liší dle výrobce systému/automobilu). Tyto systémy patří mezi nedílnou součást moderních vozidel a jejich pomocí je zvyšováno pohodlí řidiče, ovladatelnost a tedy i bezpečnost.
NAVRHOVANÉ ŘEŠENÍ
Jak již bylo řečeno v úvodu, motivací pro navrhovaný systém detekce jízdní stability jsou zejména vozidla se specifickými vlastnostmi a se zvýšenou tendencí ke ztrátě příčné stability. Navrhovaný systém by se dal zjednodušeně popsat jako diagnostický systém aktuálních jízdních vlastností vozidla, na který následně může navázat zpětná vazba k řídící jednotce či řidiči a v poslední fázi lze tento systém rozšířit na systém predikční – predikce však již vyžaduje širší znalostní bázi např. o parametrech komunikace.
Tento článek je zaměřen zejména na fázi první, tedy samotnou detekci jízdní stability. Systém musí splňovat podmínky systému diagnostického, tedy podmínku neinvazivního snímání dat, relativně jednoduché montáže a podmínku autonomního chování, tedy nezávislé činnosti např. na řídící jednotce automobilu. Systémy pracující na tomto principu zpravidla slouží při vývoji vozidel, v experimentální činnosti a v automobilovém sportu. Další aplikací mohou být právě školící a výcvikové systémy.
V současné době se jeví jako nejvhodnější přístup pro autonomní sledování jízdní dynamiky kombinace měření dynamických veličin v tzv. inerciální soustavě s měřením pomocí vnějších referencí (viz např. [1], [2], [3], [4]). Jedná se tedy o měření zrychlení, úhlových rychlostí případně dalších veličin jednotkou umístěnou ve vozidle a tyto informace jsou doplňovány o polohu resp. rychlost získanou prostřednictvím satelitního systému (GPS, příp. v budoucnosti systém Galileo). Výhodou inerciálního systému je zejména možnost snímání veličin s vyšší vzorkovací frekvencí, než jaké jsme schopni dosáhnout u systému satelitního. Další výhodou je nezávislost na vnějších podmínkách – např. na viditelnosti satelitů. Nevýhodou inerciálního systému jsou obecné vlastnosti měření typu dead reckoning, které inerciální měření představuje. Určování/odvozování veličin, které nejsou přímo měřeny a k jejich stanovení je nutná integrace, jsou zatíženy chybou rostoucí lineárně s časem. Integrační chyba je způsobena nemožností dokonalého odstranění zdrojů šumů. Oproti tomu přesnost měření s vnější referencí není na čase závislá (za předpokladu dostatečné viditelnosti satelitů). Absolutní přesnost v určování polohy pomocí volně přístupného uživatelského kanálu GPS L1 není však pro většinu aplikací dostačující (průměrná přesnost cca 10 m horizontálně resp. cca 15 m vertikálně), s výhodou se proto využívá měření rychlosti, které je založeno na principu
Dopplerova jevu vznikajícího na nosné vlně signálu, pro GPS L1 se uvádí přesnost cca 2 až 5 cm/s v horizontální rovině a 4 až 10 cm/s ve vertikální rovině. Výhoda vzájemné kombinace inerciálního a GPS systému je zřejmá, aplikací GPS měření se dá měření inerciální do značné míry zpřesnit – eliminuje se nevýhoda měření typu dead reckoning. Zároveň pomocí inerciálního systému lze postihnout i situace, kdy je signál družic zastíněn, dochází k vícenásobným odrazům či je úplně ztracen. Výpočet z hodnot inerciálního měření pak slouží k překlenutí těchto výpadků.
Jak již bylo řečeno, měření v inerciálním systému je zatíženo řadou nepřesností. Signál ze snímačů je obecně tvořen samotným záznamem průběhu měřené veličiny, offsetem a šumem. Na přesnost měření má vliv nerovnoběžnost umístění snímače vzhledem k souřadnému systému vozidla, vibrace přenesené na snímač a dále samotná specifikace snímačů a vliv vnitřních chyb (neortogonalita os samotného snímače, vlastní šum snímače, offset snímače, stabilita offsetu, teplotní drift). Pro eliminaci šumů, resp. propojení dvou zmíněných přístupů měření s výhodou slouží Kalmanova filtrace.
Kalmanův filtr je algoritmus, který, zjednodušeně řečeno, využívá série měření v čase, které obsahují šum a další nepřesnosti, a na jejich základě vytváří odhad neznámých proměnných. Kalmanův filtr se skládá z procesu filtrace (jde o posun času v datech, aktualizace měření, při které se informace z nově naměřených dat vkládá do odhadu stavu) a z procesu predikce (posun času ve stavu, časová aktualizace, při které se stav predikuje podle modelu dynamiky stavu, aniž by se měřila nová data).
Je-li odstraněn vliv šumu, je v dalším kroku nutné odstranit z naměřených dat vliv působení příčného a podélného sklonu terénu, resp. klopení a klonění automobilu vlivem odpružení. Aby bylo možné tento problém korektně provést, je nutné rozšířit počet snímacích míst – minimálně na dvě. Díky této vzájemné poloze snímačů (resp. antén přijímače GPS), je možné provést kompenzaci zohledňující vliv terénu.
Existuje množství modelů, které matematicky popisují chování automobilu, resp. jeho odezvu na vstupní podněty. Jedním ze základních lineárních dynamických modelů vozidla v podélné rovině je tzv. jednostopý model vozidla (zde neuveden). Pro popis dynamiky v příčném směru slouží např. diferenciální rovnice (1) dle obr. 1.
kde JxoC – moment setrvačnosti k ose klopení [kg.m2], CΨ – klopné tlumení [Nm.s.rad–1], KΨ – klopná tuhost odpružení [Nm.rad–1 ], Ψ – úhel klopení [rad], ms – hmotnost odpružené hmoty vozidla [kg], αy– boční zrychlení [m.s–2], (hs - ho – výška těžiště nad osou klopení [m], g – gravitační zrychlení [m.s–2].
Naměřená data, již zbavena šumu a dalších vlivů, se dají považovat za výstup takovéhoto modelu (či kombinace modelu příčného a podélného). Je patrné, že matematický model obsahuje neznámé veličiny jakými je hmotnost, klopná tuhost odpružení, hmotnostní moment setrvačnosti či aktuální výška těžiště. Tyto veličiny nejsou za normálních okolností, bez nutnosti dalších měření, jednoduše zjistitelné. Cílem je tedy takovýto model na základě dostupných naměřených veličin co nejvíce zpřesnit. Takováto úloha vede na průběžně se učící systém, který charakterizuje chování automobilu. Podstatou řešení problému se jeví konstrukce modelu směsi komponent, odhad modelu a následně průběžná predikce chování resp. určení dynamického prahu převrácení.
POUŽITÁ ZAŘÍZENÍ, VÝSLEDKY MĚŘENÍ
V současnosti jsou pro projekt k dispozici snímací zařízení od společnosti Xsens. Konkrétně se jedná o dva snímače s označením MTi‑G. Snímač jako celek je tvořen integrovaným snímačem zrychlení ve třech osách, snímačem úhlové rychlosti otáčení kolem tří os (gyroskopem) a GPS anténou. Jedná se tedy o propojení lokálních MEMS snímačů a globálního polohovacího systému. Jako pomocné snímače slouží 3D snímač magnetického pole a snímač tlaku. Jako senzor kontrolní je uvnitř zástavby umístěn snímač teploty. Rozsahy snímačů viz tab. 1. Uživateli je nabídnuta možnost využít přednastavených Kalmanových filtrů, jejichž parametry jsou však neznámé, či výstupy zaznamenávat v tzv. holém stavu a filtraci provádět následně formou postprocessingu dle parametrů vlastních. Pro námi volenou aplikaci se druhý přístup jeví jako vhodnější. Přijímač GPS pracuje se vzorkovací frekvencí 4 Hz, inerciální systém defaultně se 100 Hz (maximálně 512 Hz, jsou-li zaznamenávány údaje v holém módu).
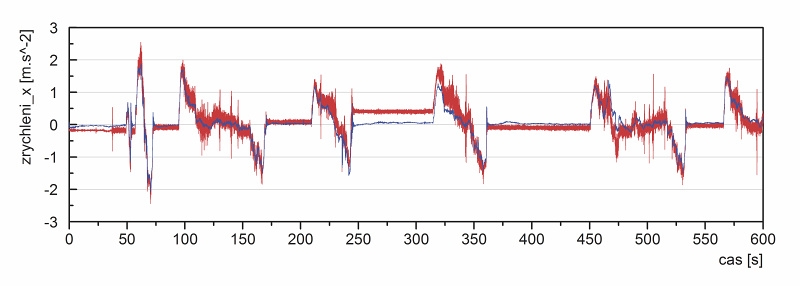
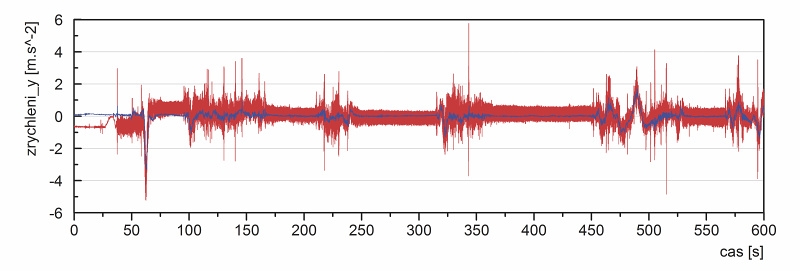
V současné době je řešena problematika filtrace dat, kompenzace nestability gyroskopů, odstraňování příčného a podélného sklonu terénu z naměřených hodnot a zohlednění vlivu klonění a klopení vozidla na inerciální měření. V grafech na obr. 2 resp. 3 je příklad naměřených hodnot zrychlení v ose x resp. y před (červeně) a po (modře) odstranění hlavních chyb měření, vibrací, šumu a vlivu sklonu vozovky. Jedná se o 10 minutový výřez (0 – 600 s) ze záznamu měření, který je na mapovém podkladu znázorněn na obr. 4 (zobrazena celá měřená trasa, cca 26 min.). Takto upravená data mohou dále přímo sloužit pro odhad modelu chování a výpočet neměřených veličin, jakými je např. úhel směrové úchylky.
Tab. 1 – Rozsahy použitých snímačů
| snímač | akcelerometr | gyroskop | magnetometr | teploměr | tlakoměr |
| jednotka | [m.s–2] | [st.s-1] | [mGauss] | [°C] | [Pa] |
| rozsah | +/- 50 | +/- 300 | +/- 750 | - 55 sž + 125 | 30 až 120.103 |
ZÁVĚREM
Nezávislý systém tohoto druhu by mohl přispět k diagnostice tzv. dynamického stavu převrácení a k zohlednění aktuálního provozního stavu vozidla. V současné době je měřítkem příčné stability zpravidla tzv. statický práh převrácení, který je také referenční hodnotou pro určení způsobilosti vozidel pro přepravu nebezpečného nákladu. Vývoj tohoto systému může dále sloužit pro predikci nehodových stavů, případně jako podpora výcviku řidičů, jejichž vliv na případný vznik nehodového děje stále zůstává zásadní, jak vyplývá mj. z [8], [9].
LITERATURA:
[1] D. M. Bevly, C. J. Gerdes, C. Wilson a G. Zhang, „The Use of GPS Based Velocity Measurements fo Improved Vehicle State Estamination,“ v Proceedings of the American Control Conference, Chicago, 2000.
[2] D. M. Bevly, R. Sheridan a C. J. Gerdes, „Integrating INS Sensors with GPS Velocity Measurements for Continuous Estimation of Vehicle Sideslip and Tire Cornering Stiffness,“ v Proceedings of the American Control Conference, Arlington, 2001.
[3] J. Novák, Snímání a zpracování údajů lokalizace dopravního prostředku, Brno: dizertační práce, FSI VUT v Brně, 2006.
[4] J. Ryu a C. Gerdes, „Integrating Inertial Sensors with GPS for Vehicle Dynamics Control,“ Journal od Dynamic Systems, Measurement and Control, 2004.
[5] A. Kvášová, Detekce podmínek stability vozidla, Praha: diplomová práce, FD ČVUT v Praze, 2009.
[6] P. Liu a S. Rakheja, „Detection of Dynamic Roll Instability of Heavy Vehicles for Open-Loop Rollover Control,“ SAE, Paper no. 973263, 1997.
[7] C. B. Winkler a R. D. Ervin, „On-board Estimation of the Rollover Threshold of Tractor Semitrailers,“ Vehicle System Dynamics, no. 33, 1999.
[8] T. Mičunek, „Road Passive Safety“, 1. ed. Saarbrücken: Lambert Academic Publishing, 2012. 184 p. ISBN 978-3-8484-4887-6
[9] J. Kocourek, a T. Padělek, T., „Human (Driver) Errors“ v Perner‘ s contacts. 2011, vol. 6, no. 5, p. 123-128. ISSN 1801-674X
Heavy Truck Stability Detection
The paper presents a project of Faculty of Transportation Sciences, CTU in Prague, which is focused on the stability of heavy trucks. A diagnostic system of vehicle lateral stability is developed within the project. The aim of the system is to determine the vehicle lateral stability and the vehicle handling via IMU/GPS measurement combination. The project is focused on vehicles with high CoG, trucks for ADR transportation, tankers for liquid and bulk cargo. The system is suggested to observe the actual vehicle handling, taking into consideration of loading and vehicle properties.
![Obr. 1 – Model automobilu v příčné rovině [5].](/PublicFiles/UserFiles/image/SZ/2012/SZ512/800x800_mic01.jpg)

NEJčtenější souvisejicí články (v posledních 30-ti dnech)
V minulém roce médii proběhly informace typu, „kruhových objezdů je hodně“, „v některých případech jsou zbytečné a nesmy...
Článek se ve dvou dílech zabývá řízením železniční dopravy. Problematika řízení železniční dopravy je v rámci jednotlivý...
Druhá část článku z oboru železniční dopravy, zabývajícího se konkrétně tématem jejího řízení, vysvětluje základní aspek...
NEJlépe hodnocené související články
Na 6,5 kilometru dlouhém mezistaničním úseku dvoukolejné trati stavbaři odstranili vady snižující komfortní užívání trat...
říká v rozhovoru pro Silnice železnice Radim Čáp, ředitel divize 4 Metrostavu a zároveň člen představenstva, který má na...
Nově budovaný severní obchvat Opavy (I/11 Opava, severní obchvat - východní část) má výrazně ulevit dopravní situaci v m...
NEJdiskutovanější související články
Původní most v obci Podolsko postavený v letech 1847 – 1848 přestal počátkem dvacátých let minulého století vyhovovat do...
ArcelorMittal Ostrava prostřednictvím své dceřiné společnosti ArcelorMittal Distribution Solutions Czech Republic pokrač...
„Vnější pražský okruh se stane alfou a omegou tranzitní přepravy na území ČR,“ řekl Ing. Marcel Rückl, porad...



ISSN 1803-8441 | © Copyright 2002 - 2026 KONSTRUKCE Media, s.r.o.
Jakékoliv užití obsahu včetně převzetí, šíření či dalšího zpřístupňování článků a fotografií je bez souhlasu nakladatelství zakázáno.
KONSTRUKCE Media, s.r.o., se sídlem Starobělská 1133/5, 700 30 Ostrava, zapsaná v obchodním rejstříku vedeným u Krajského soudu v Ostravě, oddíl C, vložka 22003, Identifikační sídlo: 25851276 | Tel.: 597 317 578 | Fax: 597 579 166


